| | |
 | KISTERS 3DViewStation: verbesserte Effizienz durch optimierte Bedienoberfläche, eine Pressemitteilung
|
|
Autor
|
Thema: Mechanismus kann nicht simuliert werden, da zu wenig Befehle (2321 / mal gelesen)
|
ffp19
Mitglied
Student

   Beiträge: 16
Registriert: 26.04.2017 Catia V5R20
|

 erstellt am: 11. Mai. 2017 21:10
erstellt am: 11. Mai. 2017 21:10  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
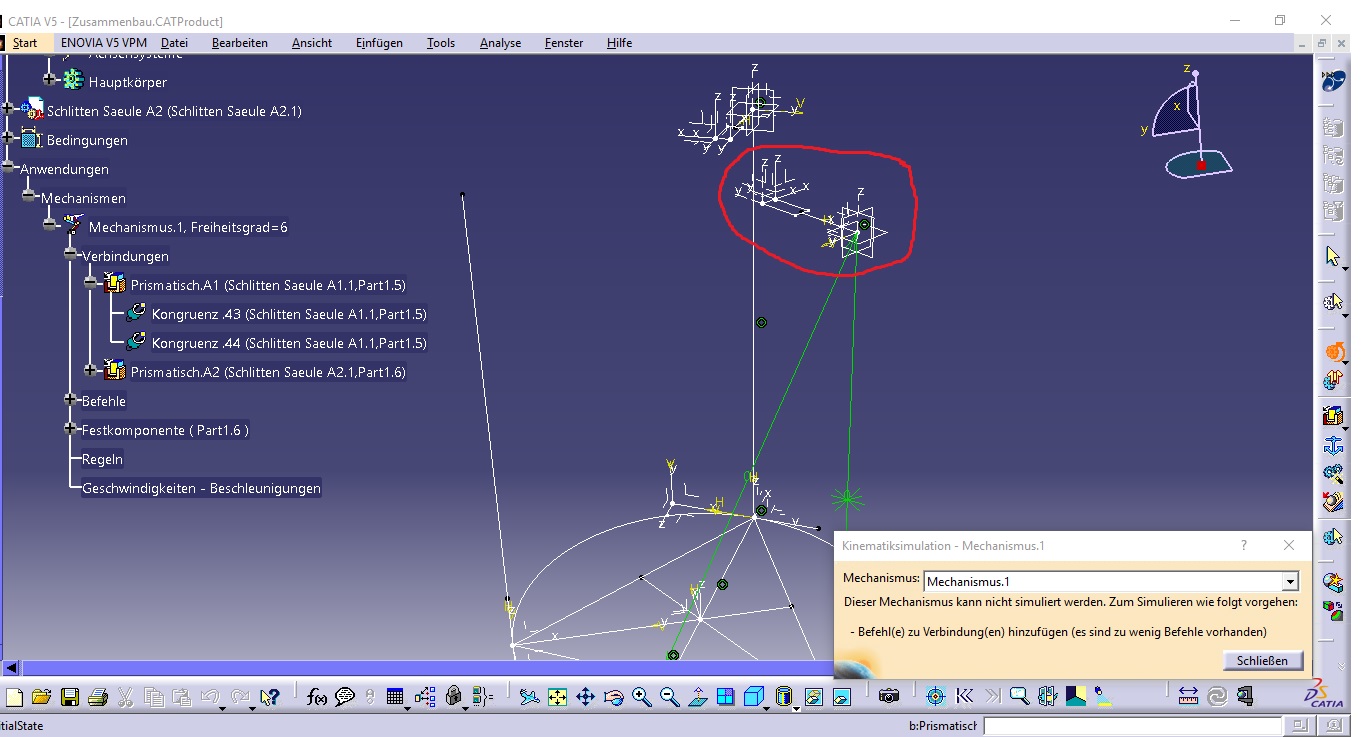
Hallo, ich habe mal wieder ein Problem mit der DMU-Kinematik... Ich erstelle gerade einen neuen Delta-Roboter, bei dem ich an jeder der drei Säulen einen Schlitten mit Hilfe einer Prismatischen Verbindung anbringen möchte. Den ersten habe ich eher durch Zufall richtig angebracht und kann ihn auf der Säule verschieben. Jetzt möchte ich den zweiten anbringen, aber wenn ich simulieren möchte kommt die Fehlermeldung wie im Bild zu sehen. Die Bedingung "Abhängige Länge" habe ich aktiviert. Und woher kommen denn die 6 Freiheitsgrade? Beim ersten Schlitten hatte ich 0 Freiheitsgrade... deshalb funktioniert es da ja auch oder? Gruß Felix  Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
bgrittmann
Moderator
Konstrukteur
    
Beiträge: 12179
Registriert: 30.11.2006 CATIA V5R19
|
erstellt am: 11. Mai. 2017 22:57 <-- editieren / zitieren --> Unities abgeben: Nur für ffp19 
Servus Felix Das liegt wohl daran dass die Säule deiner ersten prismatischen Verbindung nicht mit dem fixierten Teil verbunden ist (zB starre Verbindung zu deinem "Gestell") Gruß
Bernd ------------------
Warum einfach, wenn es auch kompliziert geht. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
ffp19
Mitglied
Student
Beiträge: 16
Registriert: 26.04.2017 Catia V5R20
|
erstellt am: 12. Mai. 2017 08:54 <-- editieren / zitieren --> Unities abgeben:
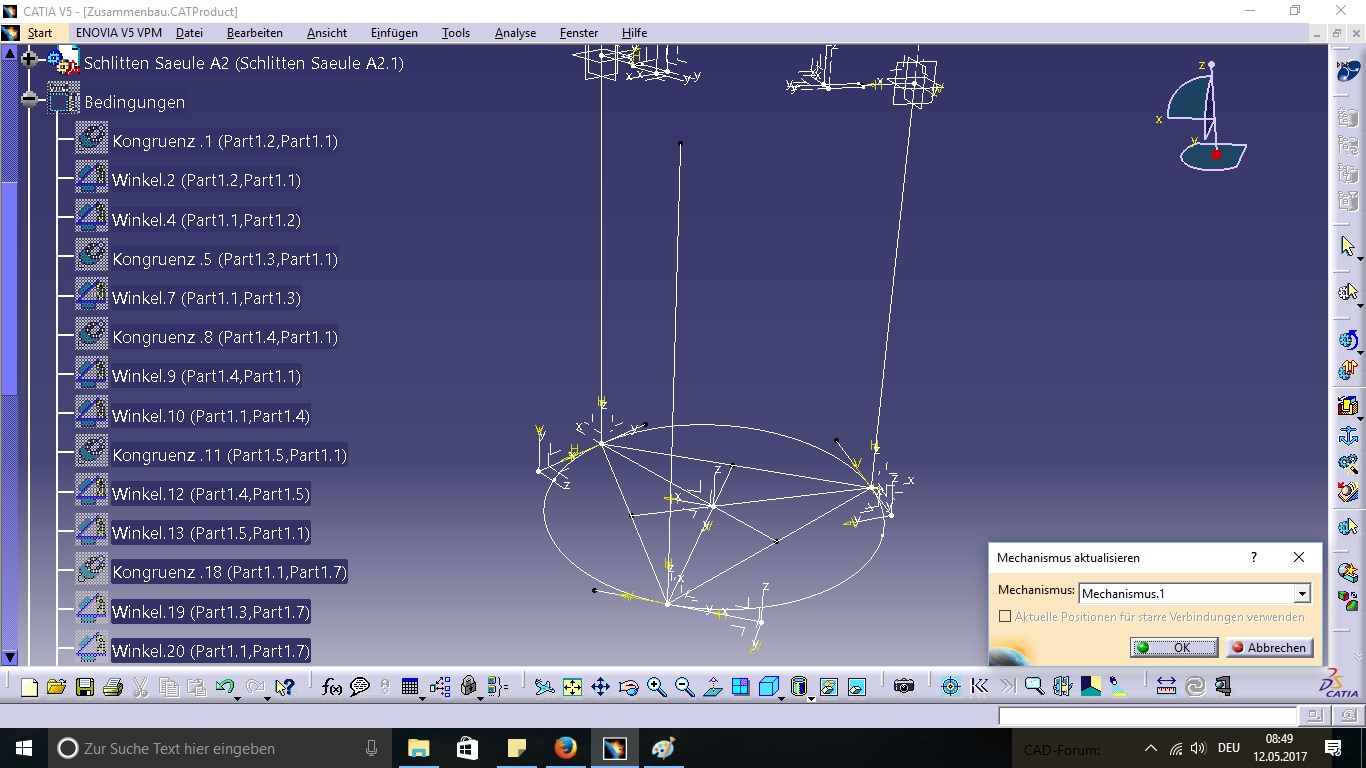
Danke für die schnelle Antwort, jetzt habe ich die zweite Säule noch einmal mit anderen Bedingungen neu eingefügt aber ich erhalte jetzt diesen neuen Fehler. Habe schon auf Positionen aktualisieren geklickt aber es tut sich nichts... Mit der Maus kann ich auch keine Positionen auswählen. [Diese Nachricht wurde von ffp19 am 12. Mai. 2017 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
bgrittmann
Moderator
Konstrukteur
Beiträge: 12179
Registriert: 30.11.2006 CATIA V5R19
|
erstellt am: 12. Mai. 2017 09:23 <-- editieren / zitieren --> Unities abgeben: Nur für ffp19
Servus Als Hinweis: Bedingungen die AssemblyDesign erstellt wurden werden in der Kinematik nicht berücksichtigt, dort müssen alle Verbindung zwischen den zu betrachtetet Bauteilen erzeugt werden. Bitte schau zunächst in ein Buch, Tutorial und in die Doku und lerne die Grundlagen der Workbench. Grundlagen zu Getriebetechnik (Freiheitsgrade, Laufgrad, ...) sind auch sinnvoll. Schau dir erst einfachere Mechanismen an. Ein Deltaroboter ist für den Anfang zu komplex. Gruß
Bernd PS: das Aktuallisiern dass du immer raus suchst ist auf Symbollseiste rechts unten ausherlab de sichbaren bereich (Doppelpfeile dorrt) ------------------
Warum einfach, wenn es auch kompliziert geht. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
ffp19
Mitglied
Student
Beiträge: 16
Registriert: 26.04.2017 Catia V5R20
|
erstellt am: 12. Mai. 2017 12:54 <-- editieren / zitieren --> Unities abgeben:
Bei einfachen Mechanismen habe ich keine Probleme, müsste denn hier für jede einzelne Säule ein neuer Mechanismus erstellt werden? Oder nur drei prismatische Verbindungen mit unterschiedlichen Namen? Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Lionel Hutz
Moderator
Beiträge: 510
Registriert: 26.03.2014 CATIA V5 R2017
|
erstellt am: 12. Mai. 2017 13:17 <-- editieren / zitieren --> Unities abgeben: Nur für ffp19
|

 Foren auf CAD.de
Foren auf CAD.de



 |
|