Hallo Sigi, hallo Rest!
Also ich kapiere es nicht. Es klappt einfach nicht. Ich dachte zuerst nicht daran, dass im Viergelenk unter bestimmten Bedingungen gegenüberliegende Teile immer parallel zueinander stehen. Und das war ja genau, was ich wollte.
Das Viergelenk erfüllt, sofern die gegenüberliegenden Teile geometrisch gleiche Abmessungen haben diese Bedingung aber automatisch. Also brauche ich keine zwei "Winkelquellen", ich muss nur für die geometrische Gleichheit der gegenüberliegenden Teile sorgen.
Das habe ich getan bzw. der Grundgedanke meiner Konstruktion gibt diese Verhältnisse von alleine wieder. Es funktioniert trotzdem nicht.
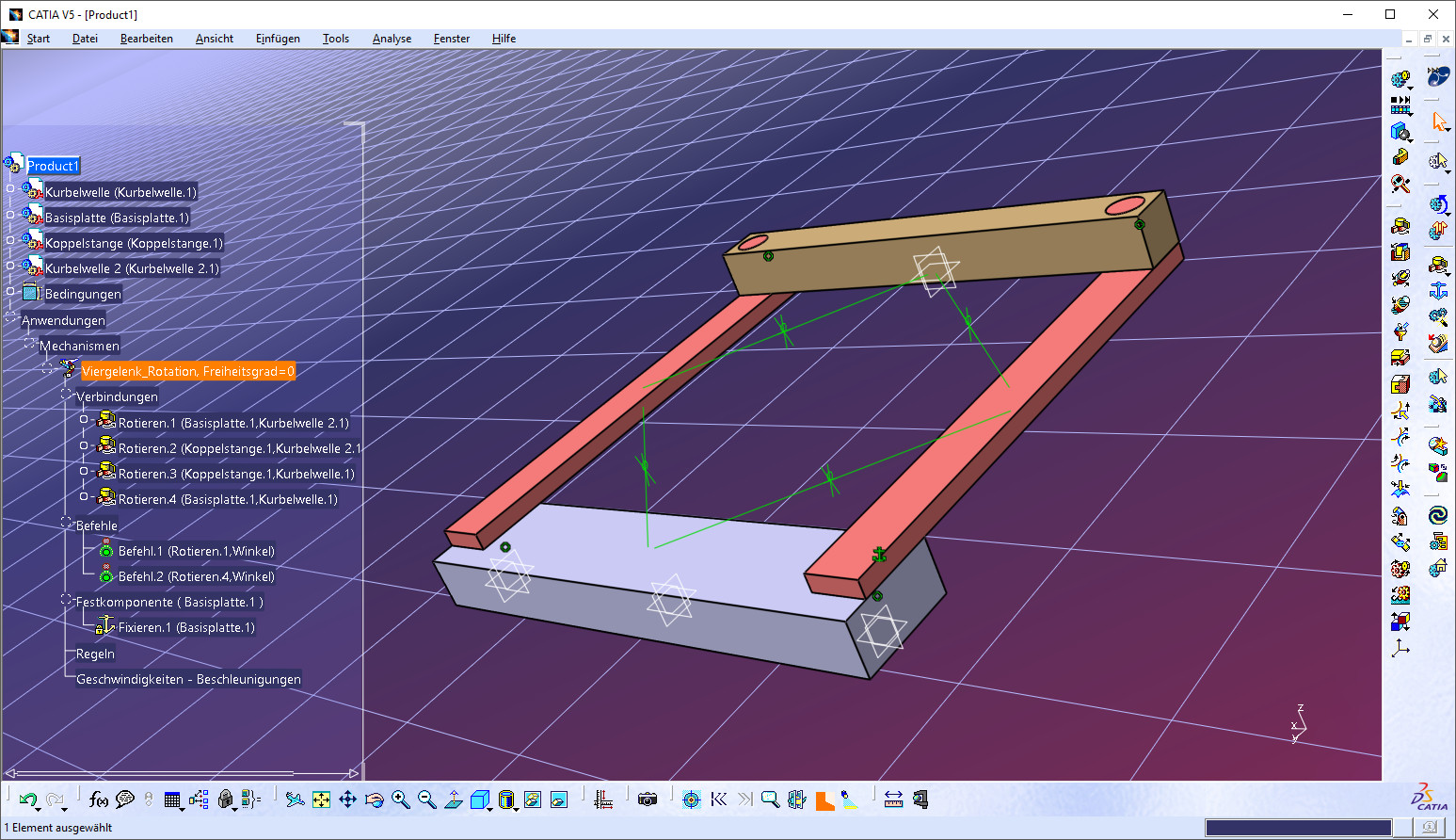
Folgendes Viergelenk, was ich simulieren möchte, jetzt nicht schematisch sondern schon das was simuliert werden soll:

Die beige Platte unten ist die Basis. In die beiden Bohrungen sollen jeweils die beiden roten Wellen so, wie sie da auch dargestellt sind. Antreiben möchte ich später die Kurbelwelle, welche die rechte der beiden ist.
Beide Wellen haben an den exzentrischen Schäften den gleichen Hub, nur der Durchmesser der Schäfte ist konstruktiv bedingt geringfügig anders was aber kinematisch keine Rolle spielt. Das ganze ist sicher, weil ich beide Modelle aus der selben Basis aufgebaut habe:

Die oberen Enden der beiden Wellen sind auf unterschiedlichen Ebenen verschieden geometrisch ausgebildet weil sich das graue Bauteil, welches ich darauf aufstecken und letztendlich simulieren will, eine andere Geometrie an den beiden Lagerpunkten aufweist:

Der Achsabstand des mittleren großen und des äußeren kleinen Lagersitzes des grauen Bauteils entspricht präzise dem Abstand der beiden Bohrungen in der beigen Platte unten. Nur die Höhenlagen unterscheiden sich was aber kinematisch keinen Einfluss haben sollte.
Also baue ich jetzt in DMU Kinematik meinen Mechanismus zusammen.
Als erstes fixiere ich die Grundplatte:

Dann verbinde ich Grundplatte und Kurbelwelle unten am Zapfen per "Drehverbindung". Das soll die führende Simulation sein, ich drehe also an der Kurbelwelle und erhalte dabei die Meldung, dass jetzt simuliert werden könne:


Nach gleichem Muster koppele ich die Wackelaugenwelle ohne "Abhängiger Winkel" an die Grundplatte:


Dann verkoppele ich nach gleichem Muster das graue Teil ohne "Abhängiger Winkel" an die Kurbelwelle. Das graue Teil ist schon um 45° verdreht um die letzte Verbindung optisch noch gut machen zu können:


Also zum Schluss die letzte Drehverbindung des grauen Teils zur Wackelaugenwelle:


Also alle Maße passen! Alle Lager passen, alle Höhen, alle Teile stehen korrekt aufeinander und bilden ein klassisches Viergelenk.
Es bleibt für das angetriebene Teil ein Freiheitsgrad über, was der Logik nach eigentlich auch mechanisch völlig korrekt sein müsste weil diese Kurbelwelle genau eine Drehung um die Z-Achse vollziehen können muss damit sich der Mechanismus bewegt. Auch der Strukturbaum kommt mir richtig vor:

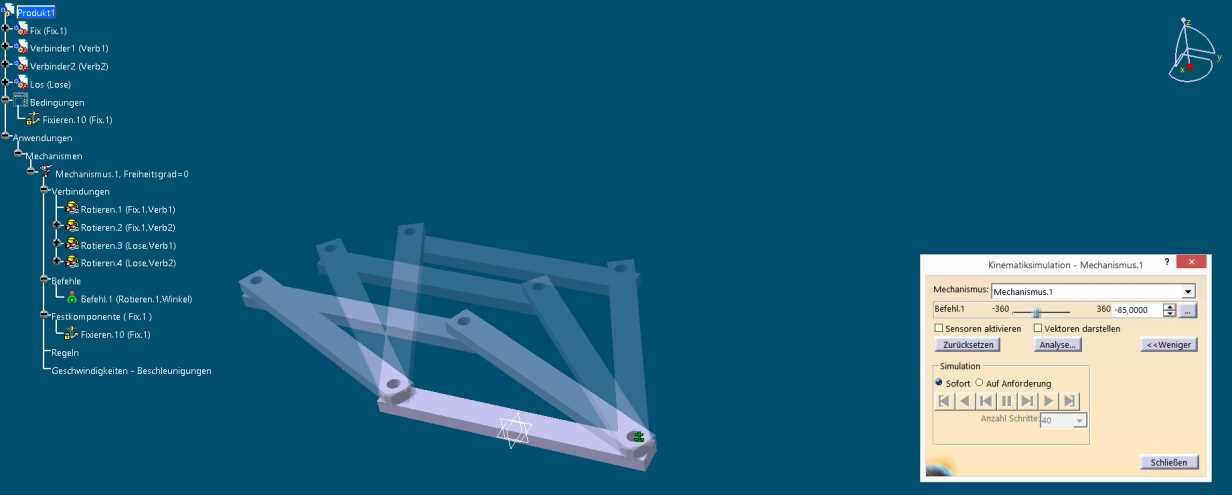
Nur, will ich jetzt simulieren, kommt das dabei heraus: 



Wo fehlen denn dort noch kinematische Kopplungen? Und wieviele Freiheitsgrade muss der Mechanismus eigentlich haben?
Ich stehe völlig auf dem Schlauch. Die Meldung, dass nun simuliert werden könne, die kam genau nur einmal. Nämlich, als ich die Kurbelwelle auf die Grundplatte mit dem "Abhängiger Winkel" gekoppelt habe. Seitdem nicht mehr ...
Hilfe ...
LG und vielen Dank,
Euer Matse
PS: Wie kann ich mir eigentlich die Freiheitsgrade anzeigen lassen?
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP

 Foren auf CAD.de
Foren auf CAD.de



 |
|