| | |
 | CATIA V5 Grundkurs | Einsteiger - 5 Std. 15 Min 48 |
| | |
 | KISTERS 3DViewStation: Multitalent für Branchen und Nischenmärkte, eine Pressemitteilung
|
|
Autor
|
Thema: Translationsvolumen eines 6-Achsen Roboters (1665 mal gelesen)
|
themech
Mitglied
   Beiträge: 6
Registriert: 27.01.2015
|

 erstellt am: 27. Jan. 2015 09:20
erstellt am: 27. Jan. 2015 09:20  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Hallo, ich habe das Forum diesbezüglich schon durchsucht und bin nur auf einen Beitrag gestoßen, bei dem keine Regeln verwendet werden sollten. Meine Aufgabe ist die folgende: Ich möchte ein Translationsvolumen eines einfachen 6-Achs-Roboters simulieren. So soll der gesamte Arbeitsbereich des Roboters dargestellt werden. Der Roboter ist von mir komplett kinematisiert. Mein Ansatz wäre jetzt Regeln zu entwerfen über die jede Achse über ihren Winkelbereich verfährt. Leider habe ich noch nie Regeln entworfen und bräuchte hier eine Hilfestellung, bzw. gibt es einen einfacheren Weg den Roboter zu simulieren? Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
thomasacro
Ehrenmitglied V.I.P. h.c.
Ingenieur Anwendungsberater

Beiträge: 3734
Registriert: 12.05.2004 V4
V5 2016 - 2020
V6 2016x -2019x
|
erstellt am: 27. Jan. 2015 10:13 <-- editieren / zitieren --> Unities abgeben: Nur für themech 
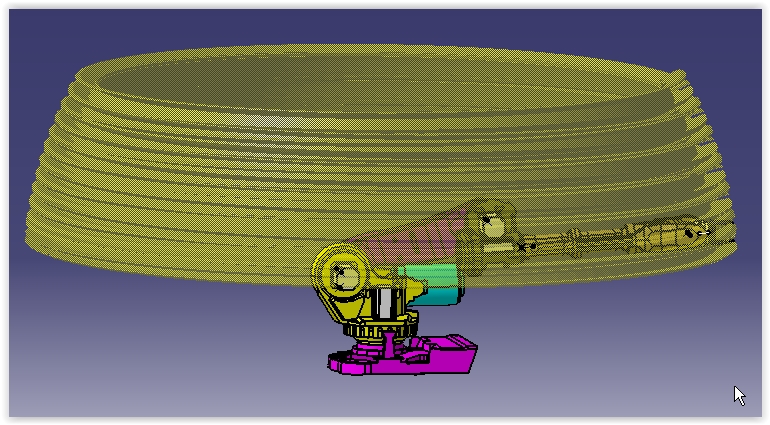
hi themech und willkommen im Forum. Ich stelle mir einen freistehenden Roboter vor: Der Bewegungsraum ist ja dann annähernd eine halbkugel. Es genügt doch bestimmt, die Extrempositionen abzufahren!? - Arm komplett ausfahren - In einer Simulation gesamtes gestell um beispielsweise 10*360° Drehen lassen und gleichzeitig den Großen Arm um 180° Schwenken - aus dieser Simulation ein Replay, daraus das SweptVolume erzeugen Sollte es noch nicht genau genug sein, die winkelwerte variieren. ------------------
gruß, Tom  Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
themech
Mitglied
Beiträge: 6
Registriert: 27.01.2015
|
erstellt am: 27. Jan. 2015 10:30 <-- editieren / zitieren --> Unities abgeben:
Hallo und vielen Dank! Die Extrempositionen würden mir schon sehr weiterhelfen. Bis jetzt bin ich nicht darüber hinausgekommen mit einer Regel den Winkel konstant zu verändern. Beispiel: Mechanismus.2\KINTime /1s*1deg
Wie kann ich denn meine Anschläge der Gelenke realisieren? Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
thomasacro
Ehrenmitglied V.I.P. h.c.
Ingenieur Anwendungsberater
Beiträge: 3734
Registriert: 12.05.2004 V4
V5 2016 - 2020
V6 2016x -2019x
|
erstellt am: 27. Jan. 2015 10:39 <-- editieren / zitieren --> Unities abgeben: Nur für themech
|
themech
Mitglied
Beiträge: 6
Registriert: 27.01.2015
|
erstellt am: 27. Jan. 2015 10:45 <-- editieren / zitieren --> Unities abgeben:
Okay, jetzt habe ichs verstanden. Wie kann ich denn in einer Simulation mehrere Achsen gleichzeitig verfahren? Im Moment erstelle ich eine Simulation, hier gibt es die Möglichkeit über 6 Befehle die Freiheitsgrade zu verändern. Das heißt ich verfahre das Grundgestell jeweils um x Grad und schwenke dann einmal vor und zurück und wiederhole dies für die knapp 300°? Grüße Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
thomasacro
Ehrenmitglied V.I.P. h.c.
Ingenieur Anwendungsberater
Beiträge: 3734
Registriert: 12.05.2004 V4
V5 2016 - 2020
V6 2016x -2019x
|
erstellt am: 27. Jan. 2015 10:58 <-- editieren / zitieren --> Unities abgeben: Nur für themech
ja, so in der Art. Ich habs gerade auch mal für die ersten paar Schwenkgrade gemacht. Ist also ähnlich wie ein Pinsel mit dem du in immer höher liegenden Bahnen in die Luft malst. ------------------
gruß, Tom Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
themech
Mitglied
Beiträge: 6
Registriert: 27.01.2015
|
erstellt am: 27. Jan. 2015 11:36 <-- editieren / zitieren --> Unities abgeben:
|
thomasacro
Ehrenmitglied V.I.P. h.c.
Ingenieur Anwendungsberater
Beiträge: 3734
Registriert: 12.05.2004 V4
V5 2016 - 2020
V6 2016x -2019x
|
erstellt am: 27. Jan. 2015 11:46 <-- editieren / zitieren --> Unities abgeben: Nur für themech
Bestimmt könnte man dafür ein Skript erstellen und programmieren. Meines Erachtens ist der Aufwand dafür aber recht (zu?) groß. Das von mir angehängte Beispiel hat ca 5 Minuten gedauert. Und wenn du das nicht mehrmals täglich brauchst, ist dieser Aufwand noch überschaubar. ------------------
gruß, Tom Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
themech
Mitglied
Beiträge: 6
Registriert: 27.01.2015
|
 erstellt am: 27. Jan. 2015 11:47 <-- editieren / zitieren --> Unities abgeben:
erstellt am: 27. Jan. 2015 11:47 <-- editieren / zitieren --> Unities abgeben:
|
Thomas Harmening
Ehrenmitglied V.I.P. h.c.
Arbeiter ツ

Beiträge: 2897
Registriert: 06.07.2001
|
erstellt am: 27. Jan. 2015 16:50 <-- editieren / zitieren --> Unities abgeben: Nur für themech
Extrapart, Skizze und Rotationskörper (10% transparent) sollte reichen - Vorteil schlank und geht IMHO ") schneller als alle Sweepvolumen zu erstellen  Das Sweepvolumen ist zwar schön, aber in diesem Falle nicht unbedingt sinnvoll? Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
themech
Mitglied
Beiträge: 6
Registriert: 27.01.2015
|
erstellt am: 27. Jan. 2015 16:52 <-- editieren / zitieren --> Unities abgeben:
Hallo Thomas, ich hätte eigentlich gern den gesamten Arbeitsraum abgebildet, also auch das Minimum. Dann wäre es sinnvoller gewesen, leider bin ich was das angeht nicht weiter gekommen. Beste Grüße  Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de
Foren auf CAD.de



 |
|