Hallo,
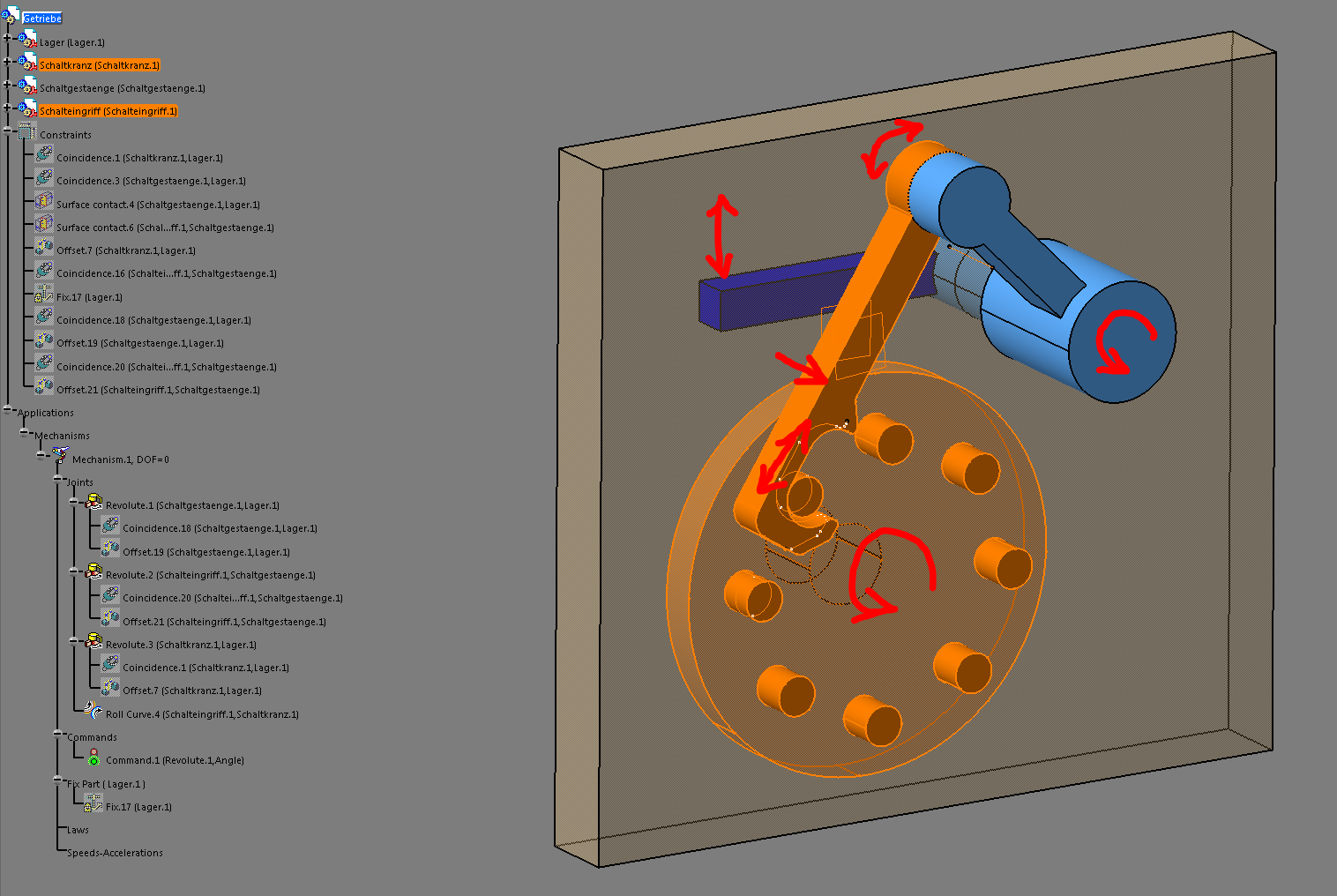
an sich bin ich bereits mit Catia sehr gut vertraut, aber mit Kinematik habe ich mich noch sehr wenig beschäftigt. Zum Üben habe ich jetzt ein kleines Schaltgetriebe in vereinfachter Form gebaut, um die Bewegung vom Schaltgestänge über den Schalteingriff auf den Schaltkranz (dieser dreht im Weiteren die Schaltwalze) gebaut.
Der Schalteingriff soll bei Drücken/Ziehen des Schaltgestänges sich in den Pins des Schaltkranzes einrasten und diesen dann drehen. Der Schalteingriff wird in echt von einer Feder gegen die Pins gedrückt. Ich hoffe, ich habe das auf dem Bild leicht verständlich dargestellt.
Das Problem ist, dass mit einer Rollverbindung der Schalteingriff zwar am Pin entlang rutscht, sich dabei aber schon der Schaltkranz dreht (eben rollt, verstehe ich ja). Eigentlich müsste er aber erst entlangrutschen und dann einrasten und danach erst den Schaltkranz drehen. Also dachte ich, eine Slide Curve-Verbindung wäre gut. Aber damit bekomme ich es nicht hin, selbst wenn ich eine Point-Surface-Verbindung noch hinzufüge, um die Freiheitsgrade zu eliminieren.
Wisst ihr Rat, wie man das Problem lösen kann? Und das zweite Problem ist, dass der Schalteingriff auch nicht durch die Pins durchdringt, sondern an allen entweder abgleitet oder einrastet.
Ich dachte auch schon, mit einem Law die Bewegung des Schalteingriffs darzustellen, aber damit stelle ich mich auch zu dumm an.
Ich hoffe, ihr könnt mir weiterhelfen und freue mich auf eure Antworten.
Viele Grüße,
Max
[Diese Nachricht wurde von motofmstereo am 05. Feb. 2014 editiert.]
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP

 Foren auf CAD.de
Foren auf CAD.de



 |
|