Hallo alle zusammen,
ich stoße bei einer Hausaufgabe für die Hochschule auf folgendes Problem:
Wir müssen ein Kart konstruieren und simulieren, was durch zwei nicht lenkbare Vorderräder, welche durch zwei unterschiedlich schnell drehende Elektromotoren angetrieben werden, gesteuert wird.
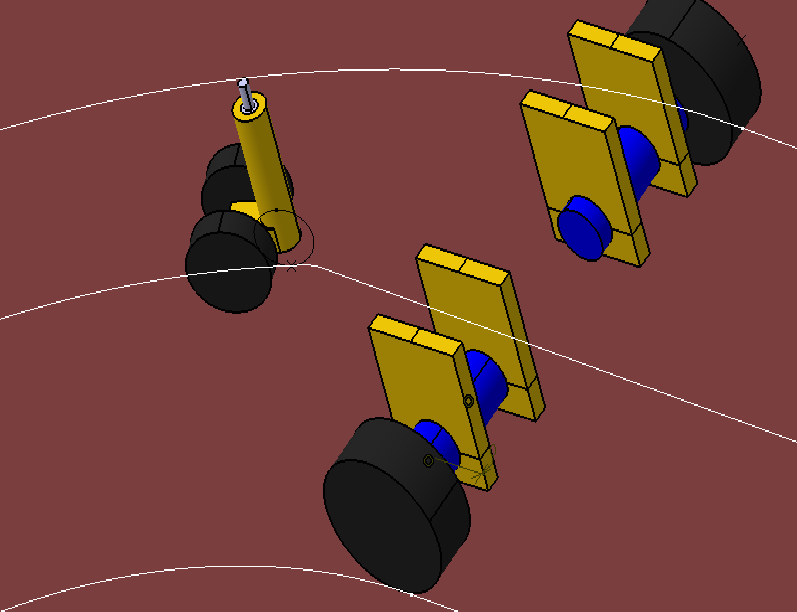
Als Hinterräder sollen zwei Räder an einer über ein Drehgelenk drehbaren Achse fungieren (Achse der Räder etwas versetzt hinter dem Drehpunkt des drehgelenks, siehe z.B. die Räder an einem Schreibtischstuhl).
Ich habe alles konstruiert und wenn ich die Hinterräder und deren Drehachse bei der Simulation einfach starr lasse, funktioniert die Simulation auch einwandfrei und das Kart fährt entlang einer festgelgten Leitlinie. Dabei schwenken die Hinterräder an den Kurven über die Leitlinie hinaus, so wie es auch sein soll.
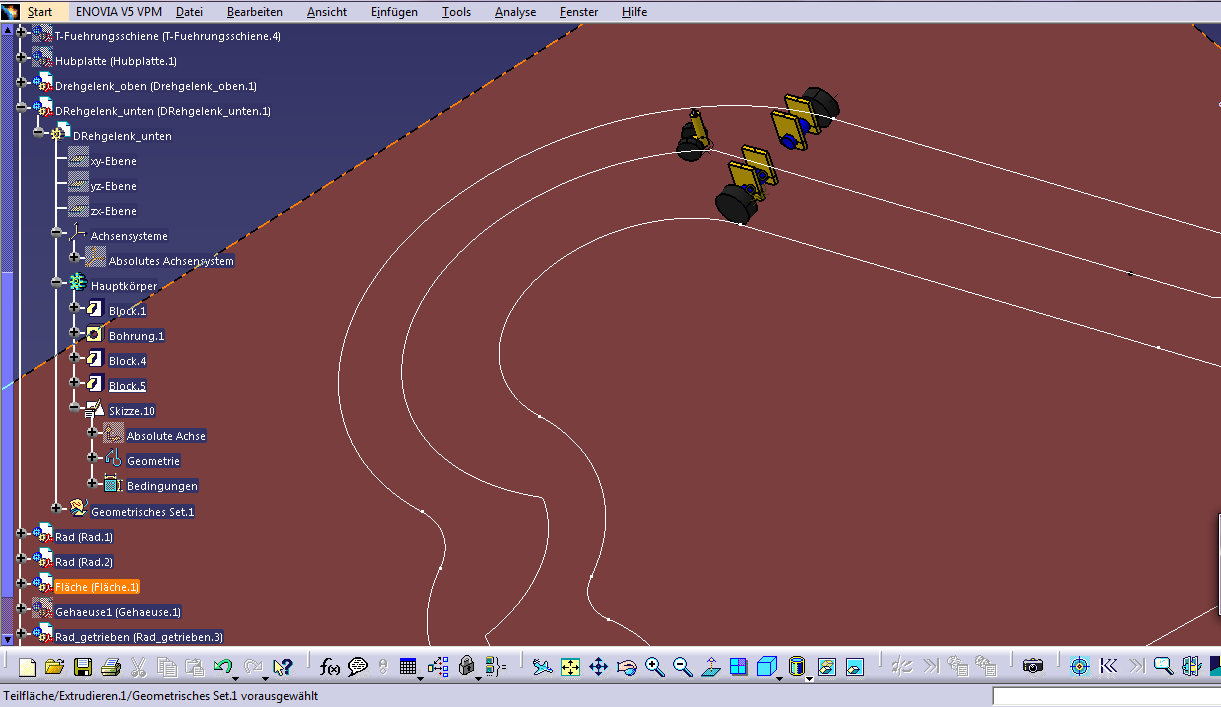
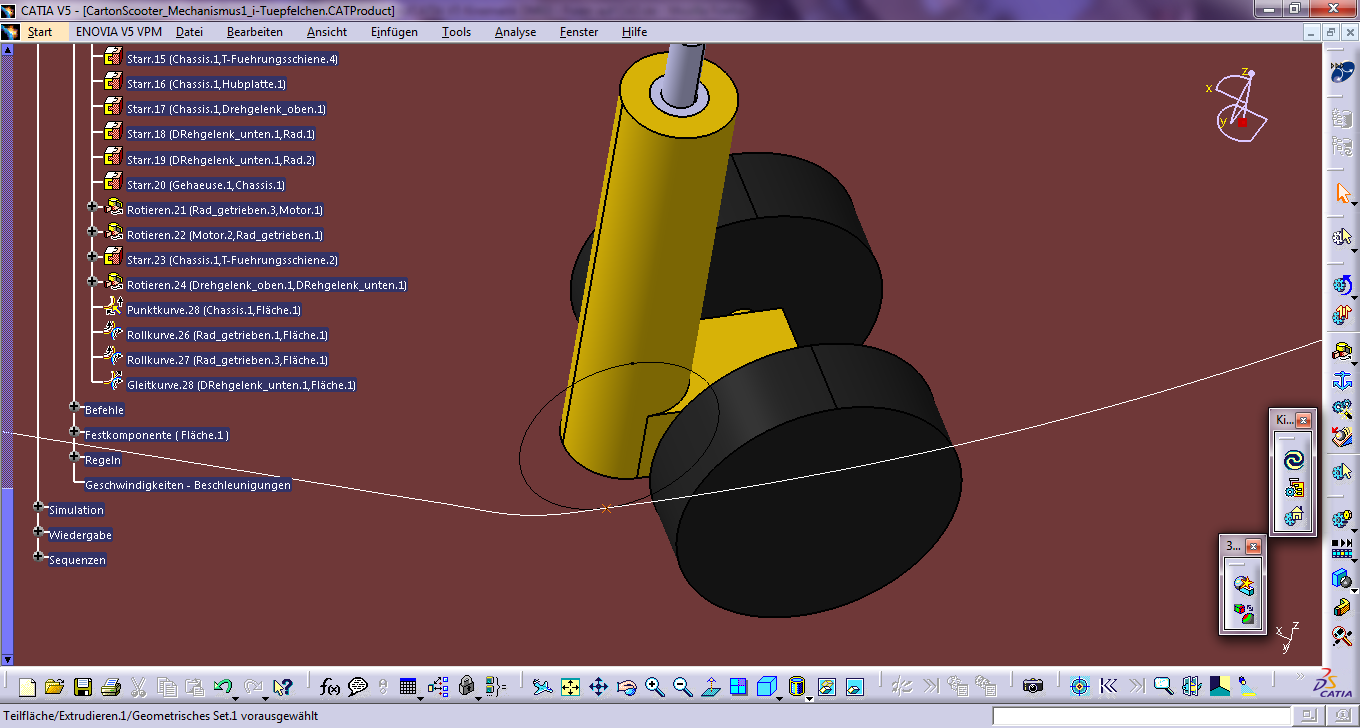
Jetzt wollte ich das Drehgelenk der Hinterachse drehbar machen und habe dazu mit der Tracefunktion einen Trace des Schnittpunktes der Drehachse mit der Fläche, auf der das Kart fährt durchgeführt. Für die Simulation des Mechanismus mit sich drehender Hinterachse, habe ich jetzt eine Gleitkurven-Verbindung zwischen der Kurve des Traces und einer Kurve (erstellt im Drehgelenk), die die Tracekurve tangential im Tracepunkt berührt. Damit sollte sich das Drehgelenk dann passend zur Kurvenfahrt drehen. Soweit so gut, nun will ich die Simulation erstellen. In den Kurven und Geraden ist es kein Problem, die Hinterachse dreht sich so, wie sie soll und schwenkt aus. Aber am Übergang zwischen Kurven und geraden bricht Catia die Simulation einfach ab. Hat jemand eine Idee, woran das liegen kann?
LG, David
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP

 Foren auf CAD.de
Foren auf CAD.de



 |
|