| | |
 | Gut zu wissen: Hilfreiche Tipps und Tricks aus der Praxis prägnant, und auf den Punkt gebracht für CATIA & Co. |
| | |
 | KISTERS 3DViewStation auf der IMTS 2026, eine Veranstaltung am 14.09.2026
|
|
Autor
|
Thema: Problem Radlader-Kinematik (12477 mal gelesen)
|
kinematik1987
Mitglied
Putze
   Beiträge: 5
Registriert: 07.12.2012 CATIA V5 R19
|

 erstellt am: 07. Dez. 2012 10:58
erstellt am: 07. Dez. 2012 10:58  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
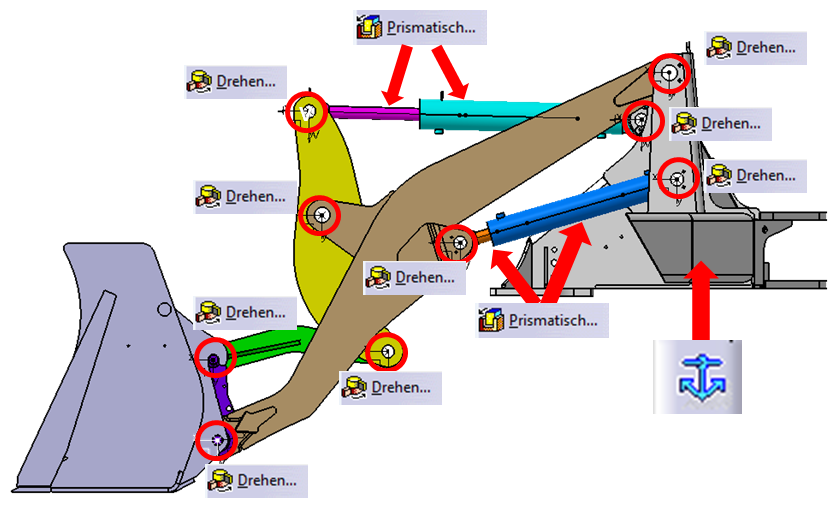
Guten Morgen, habe ein Problem bei der Mechanismus-Erstellung für eine Radlader-Kinematik. Im Assembly Design (durch den Manipulationsbefehl) funktioniert die Kinematik problemlos. Beim simulieren bzw. erstellen des Mechanismus hingegen entstehen Probleme ( Fehlermeldung sind die üblichen: Überbestimmtheit, zu viele Befehle, Freiheitsgrade etc. ) Es liegt mit ziehmlicher Sicherheit an der falschen Wahl der einzelnen Verbindungen. Derzeit besteht dieses System aus zwei prismatischen Verbindungen ( Für Hub- und Kippzylinder )und der rest ist ausschließlich aus Drehverbindungen erstellt. Anbei ist ein Bild hinzugefügt wie ich versucht habe den Mechanismus zu erstellen.
Die prinzipielle Kinematik ruht ausschließlich auf den Verfahrwegen des Kipp- und Hubzylinders(Kolbens). Hoffe ihr könnt euch vorstellen wie die Kinematik funktioniert und ihr mir vielleicht Tipps geben könnten wie ich den Mechanismus zum laufen bekomme. Vielen Dank Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Mörchen
Ehrenmitglied V.I.P. h.c.
CAD-Trainerin (CATIA V5)

Beiträge: 3830
Registriert: 14.03.2007 Release 19 SP2
|
erstellt am: 07. Dez. 2012 11:08 <-- editieren / zitieren --> Unities abgeben: Nur für kinematik1987 
Hallo kinematik1987, willkommen im Forum!
Das sieht eigentlich ganz vernünftig aus. Ich hatte auch schonmal ein ähnliches Problem: Die kinematischen Verbindungen waren richtig, trotzdem hat sich CATIA geweigert mit Fehlermeldungen. Das Problem war damals bei mir, dass CATIA nicht mehr in der Lage war, die richtige Stellung der einzelnen Komponenten zu berechnen.
Abhilfe:
Zuerst im Assembly mit den nötigsten Constraints die Teile in die exakte Position bringen. Dann die Constraints wieder löschen, die Teile aber in der korrekten Position lassen, und dann die Kinematik mit den Gelenken erzeugen. Auf keinen Fall mehr die Teile mit dem Kompass auseinander ziehen. Wenn Du an eine Achse oder Ebene nicht mehr rankommst, kannst Du ein Teil ins Hide stellen und dort die Elemente anwählen.
------------------
Gruß
Mörchen Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
kinematik1987
Mitglied
Putze
Beiträge: 5
Registriert: 07.12.2012 CATIA V5 R19
|
erstellt am: 07. Dez. 2012 11:58 <-- editieren / zitieren --> Unities abgeben:
Danke, genau diesen Weg gehe ich grundsätzlich!. Wie schon geschrieben, habe ich das Modell zuvor in Assembly Design erstellt/positioniert ( selbe Position wie im Bild ), anschließend alle Bedingungen die zuvor vom Assembly Design erstellt wurden ( Kongruenz, Offsets etc. ) gelöscht und erst dann in DMU reingeladen. Was ich auch noch probiert habe war die Funktion:"Umwandlung von Baugruppenbedingungen", damit wird versucht die Bedingungen vom Assembly Design zu übernehmen, jedoch funktioniert dies absolut nicht. Er zeigt mir dann im Strukturbaum 7 Freiheitsgrade an. Vielleicht liegt es doch an den Verbindungen, jedoch sieht das was ich erstellt habe doch soweit logisch aus Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Mörchen
Ehrenmitglied V.I.P. h.c.
CAD-Trainerin (CATIA V5)
Beiträge: 3830
Registriert: 14.03.2007 Release 19 SP2
|
erstellt am: 07. Dez. 2012 15:26 <-- editieren / zitieren --> Unities abgeben: Nur für kinematik1987
Hallo kinematik1987, lass bei Deiner Kinematik mal alle Befehle weg; Du brauchst maximal 2, aber das hast Du ja schon am Anfang geschrieben, wenn ich Dich richtig verstanden habe. Bei der automatischen Umwandlung macht CATIA soweit ich mich erinnere, statt Drehgelenke zylindrische Gelenke. Dann musst Du bei jedem zyl. Gelenk den Längenbefehl einschalten (natürlich nicht bewegen), um die Freiheitsgrade rauszukriegen. ------------------
Gruß
Mörchen Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
thomasacro
Ehrenmitglied V.I.P. h.c.
Ingenieur Anwendungsberater

Beiträge: 3734
Registriert: 12.05.2004 V4
V5 2016 - 2020
V6 2016x -2019x
|
erstellt am: 07. Dez. 2012 18:22 <-- editieren / zitieren --> Unities abgeben: Nur für kinematik1987
Hi kinematik1987 Erstmal: aussagefähiges Bild! Klasse! Und dann: Ersetze die Prismatische Verbindung der hydraulikzylinder durch Cylindrical joints (sorry, hab gerade nur englisch) und treibe innerhalb deren Axialrichtungen an. Sollte es dann noch nicht klappen, ersetze nach und nach einen revolute joint nach dem anderen durch einen cylindrical joint. Beachte das Prinzip "Festlager" - Loslager. Du kannst nicht auf beiden seiten einer Stange einen revolute-joint machen! einer reicht absolut aus. Auf der anderen seite kannst(musst) du cylindrical joints nehmen! ------------------
gruß, Tom  Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
kinematik1987
Mitglied
Putze
Beiträge: 5
Registriert: 07.12.2012 CATIA V5 R19
|
erstellt am: 08. Dez. 2012 10:29 <-- editieren / zitieren --> Unities abgeben:
Guten Morgen, danke für eure Hilfe. Vielleicht sollte ich noch etwas zum Ist-Zustand sagen bzw. meinen eigentlichen Wunsch schildern. Wie bereits gesagt funktioniert die Kinematik ausschließlich durch Wegänderung der beiden Hydraulikzylinder. Mein derzeitiges Syststem ist soweit parametrisiert, dass ich einfach nur einen Wert für den Kipp-oder Hubweg ändern muss so dass durch anschließender Aktualisation die neue Position berechnet und gestellt wird. Nur ist das ganze sehr aufwendig jedes mal Werte einzutragen und anschließend zu aktualisieren und dann zu überprüfen ob die Kinematik weiterhin ihre Performance liefert etc. Aus dieser Problematik kam die Idee das in DMU zu machen, so ist es mir möglich die Wegänderung per "Schieberegler" zu steuern und direkte Auswirkungen zu beobachten. Zu Mörchen:
Was meinst du mit alle Befehle löschen bzw. ich brauche "nur" 2. Ist es möglich, dass ich ausschließlich die beiden prismatischen Verbindungen erstelle ( im DMU ) und die restlichen Bedingungen aus dem zuvor erstellen Assembly Design genommen werden. Zu thomasacro:
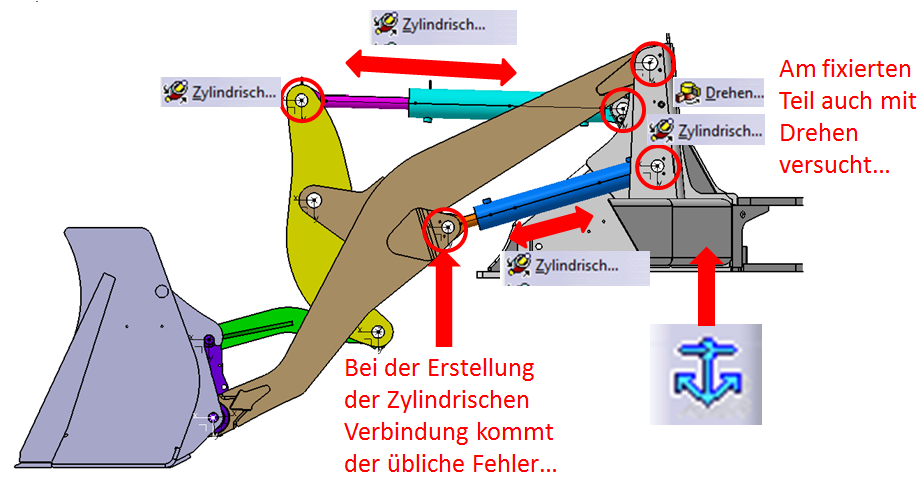
Habe deinen Rat mal soweit befolgt. Leider funktioniert es immernoch nicht. Ich habe am fixierten Teil jeweils mal mit Zylindrisch als auch mal mit Drehverbindung versucht.
Vielleicht hat ja mal jemand Interesse sich das genauer anzuschauen, kann euch was zukommen lassen [Diese Nachricht wurde von kinematik1987 am 08. Dez. 2012 editiert.] [Diese Nachricht wurde von kinematik1987 am 08. Dez. 2012 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Mörchen
Ehrenmitglied V.I.P. h.c.
CAD-Trainerin (CATIA V5)
Beiträge: 3830
Registriert: 14.03.2007 Release 19 SP2
|
erstellt am: 08. Dez. 2012 10:33 <-- editieren / zitieren --> Unities abgeben: Nur für kinematik1987
|
bgrittmann
Moderator
Konstrukteur
    
Beiträge: 12179
Registriert: 30.11.2006 CATIA V5R19
|
erstellt am: 08. Dez. 2012 11:13 <-- editieren / zitieren --> Unities abgeben: Nur für kinematik1987
Servus Dein Aufbau sieht nach dem ersten Bild sehr gut aus. Mögliche Fehler/Probleme: - du darfst nur bei den beiden "Prismatischen Verbindungen" die Option "Abhängige Länge" (bzw Winkel) aktivieren - ggf hast du die Verbindungen an der Schaufel nicht beide zum lila Teil gemacht (die Schaufel würde ich über eine Starre Verbindung an das lila Teil koppel Gruß
Bernd ------------------
Warum einfach, wenn es auch kompliziert geht. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
kinematik1987
Mitglied
Putze
Beiträge: 5
Registriert: 07.12.2012 CATIA V5 R19
|
erstellt am: 08. Dez. 2012 15:31 <-- editieren / zitieren --> Unities abgeben:
An Mörchen: Habe Strukturbäume von den verschiedenen Vorschlägen euch jeweils hochgeladen. An bgrittmann:
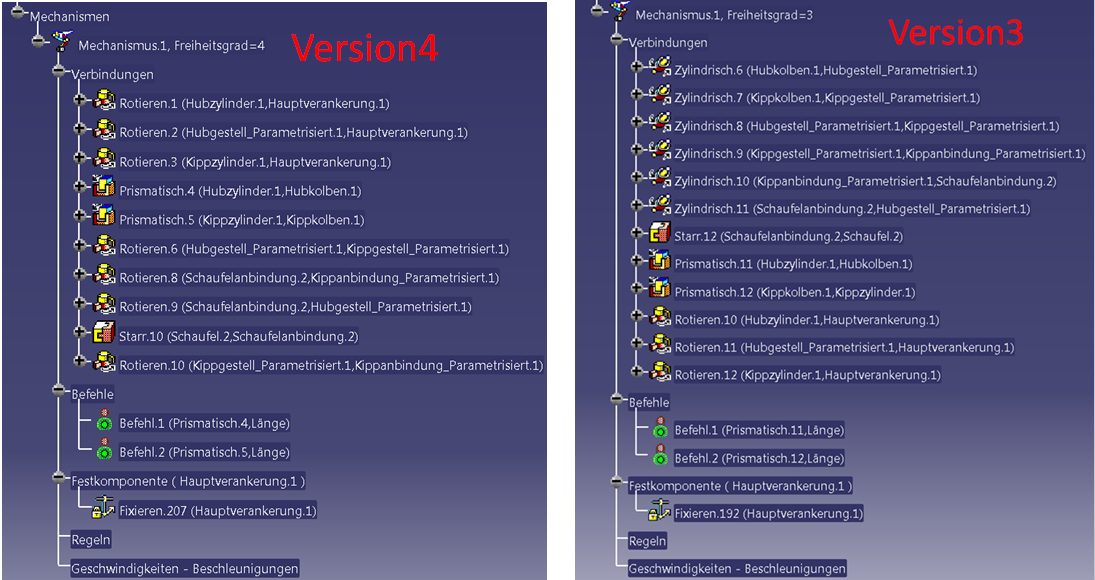
Habe deinen Rat mal soweit befolgt.Das mit der starren Verbindung ist übrigens eine gute Idee. Habe das selbe Schema verwendet wie in meinem ersten Beitrag. Alles als Drehverbindung aber ohne abhängige Länge und Winkel, die prismatischen Verbindungen hingegen sind mit abhängige Länge ( Bild Version 4 ) In Version 3:
Habe ich die lediglich die Verbindungen am fixierten Teil mit einer Drehverbindung erstellt ( Tipp wegen Festlage-Loslager ) aber ohne abhängigkeit von Länge und Winkel. In Version 2:
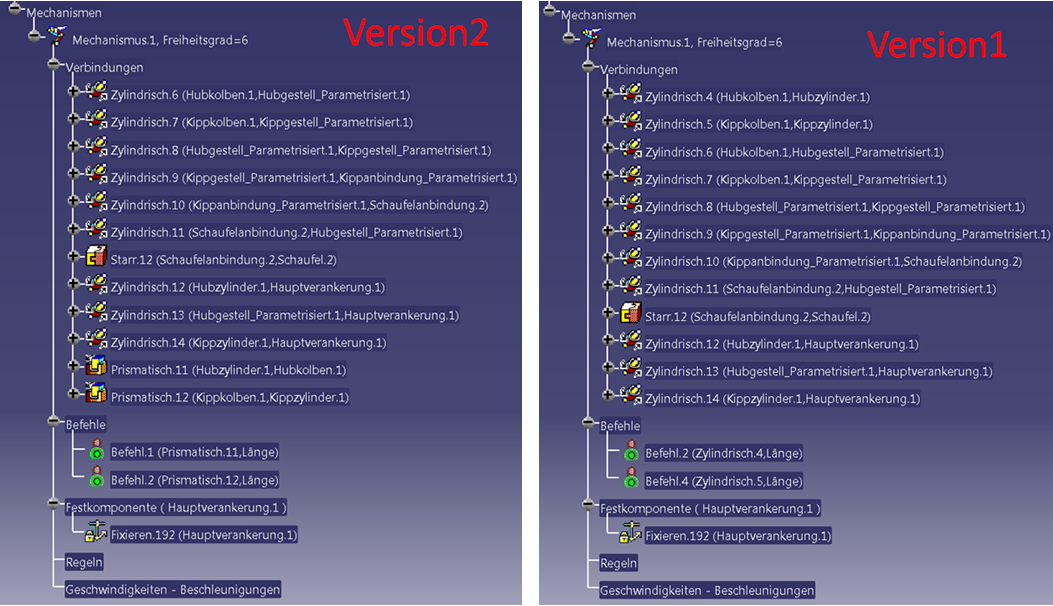
Habe ich alle Drehverbindungen durch zylindrische Verbindung ersetzt und ohne abhängige Länge und Winkel, nur die prismatischen Verbindungen wurden mit abhängige länge erzeugt. In Version 1:
Habe ich alles mit zylindrischen Verbindungen erzeugt, nur zwischen Kolben & Zylinder habe ich abhängige Länge angegeben Es funktioniert immernoch nicht, zu viele Freiheitsgrade...
Soll ich jemanden meine CAD-Daten mal zukommen lassen. Danke [Diese Nachricht wurde von kinematik1987 am 08. Dez. 2012 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Mörchen
Ehrenmitglied V.I.P. h.c.
CAD-Trainerin (CATIA V5)
Beiträge: 3830
Registriert: 14.03.2007 Release 19 SP2
|
erstellt am: 08. Dez. 2012 15:39 <-- editieren / zitieren --> Unities abgeben: Nur für kinematik1987
|
thomasacro
Ehrenmitglied V.I.P. h.c.
Ingenieur Anwendungsberater
Beiträge: 3734
Registriert: 12.05.2004 V4
V5 2016 - 2020
V6 2016x -2019x
|
erstellt am: 08. Dez. 2012 19:58 <-- editieren / zitieren --> Unities abgeben: Nur für kinematik1987
Hi Kinematik. Mal ganz was anderes:Vielleicht kann es sein, dass Achsen nicht parallel sind. Aber du sagtest, dass es mit Assembly constraints funktioniert... Aber zumindest wäre es mal eine mögliche Fehlerquelle! Kannst gerne mal deine Modelle rüberschicken! ------------------
gruß, Tom Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
thomasacro
Ehrenmitglied V.I.P. h.c.
Ingenieur Anwendungsberater
Beiträge: 3734
Registriert: 12.05.2004 V4
V5 2016 - 2020
V6 2016x -2019x
|
erstellt am: 08. Dez. 2012 20:39 <-- editieren / zitieren --> Unities abgeben: Nur für kinematik1987
|
kinematik1987
Mitglied
Putze
Beiträge: 5
Registriert: 07.12.2012 CATIA V5 R19
|
erstellt am: 09. Dez. 2012 10:06 <-- editieren / zitieren --> Unities abgeben:
|

 Foren auf CAD.de
Foren auf CAD.de



 |
|