Hallo alle zusammen,
ich arbeite derzeit an einem Projekt, bei dem ich mich dazu entschieden habe, die Kinematik zu simulieren. Bislang bin ich auch recht weit gekommen, allerdings komme ich jetzt nicht weiter.
Folgendes Problem:
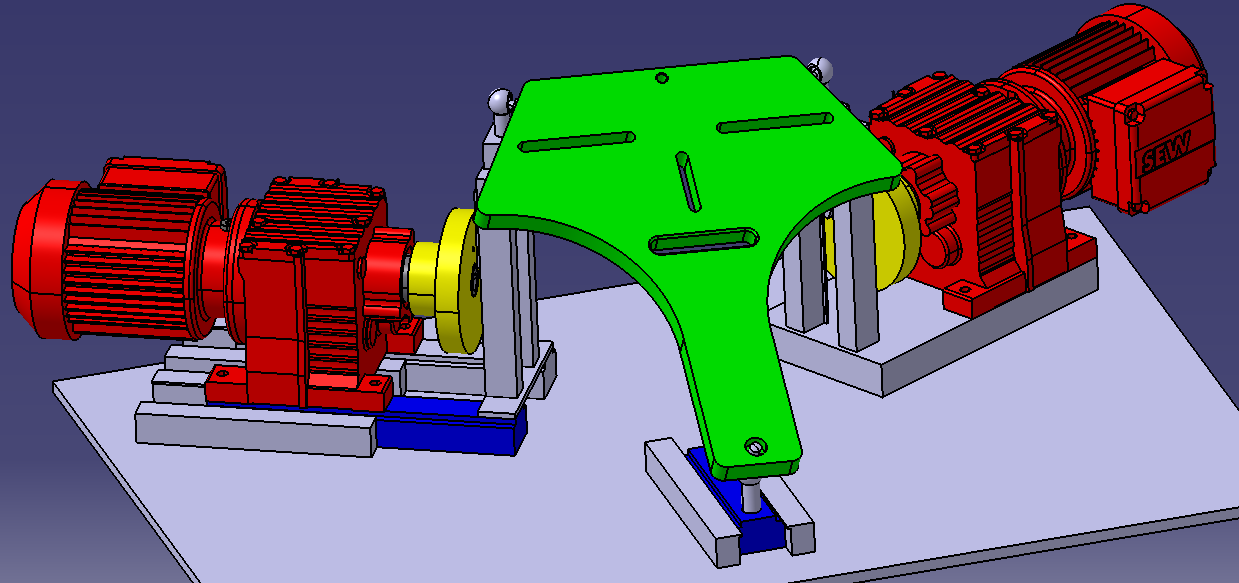
Ich konnte durch automatisch auszuführende Berechnungen erreichen, dass die rotatorischen Bewegungen der Motoren in tranlatorische Bewegungen der Winkelgelenke umgerechnet werden (es arbeiten beide Motoren mit unterschiedlichen Drehzahlen, die grüne Platte in der Mitte ist zu diesem Zeitpunkt dekativiert)! Wenn ich aber die restlichen Verbindungen hinzufüge, kann er nichts mehr simulieren, weil - meiner Meinung nach - er den Linken Motor vor und zurückbewegen muss (abhängig vom Winkel der grünen Platte). Dasselbe gilt für die Prismatische Verbindung im Vordergrund.
Da ich nunmal kein Mathematiker bin, frage ich mich, ob Catia sich diese Beziehungen/Positionen nicht automatisch berechnen und einstellen kann?
Kennt jemand von euch eine Lösung?
Danke im Vorraus!
Catia V5R19
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP

 Foren auf CAD.de
Foren auf CAD.de



 |
|