| | |
 | Gut zu wissen: Hilfreiche Tipps und Tricks aus der Praxis prägnant, und auf den Punkt gebracht für CATIA & Co. |
| | |
 | Selektieren und Filtern in 3D-CAD-Baugruppen: Schnellere Übersicht und weniger Aufwand, eine Pressemitteilung
|
|
Autor
|
Thema: Hydraulikzylinder aus V4 in V5 simulieren (3167 mal gelesen)
|
RBB86
Mitglied
S

   Beiträge: 79
Registriert: 07.04.2009 Win.7x64
V5R17
|

 erstellt am: 28. Okt. 2009 21:44
erstellt am: 28. Okt. 2009 21:44  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Hallo allerseits, ich stehe vor einem Problem und weiß leider nicht wie ich es lösen soll.
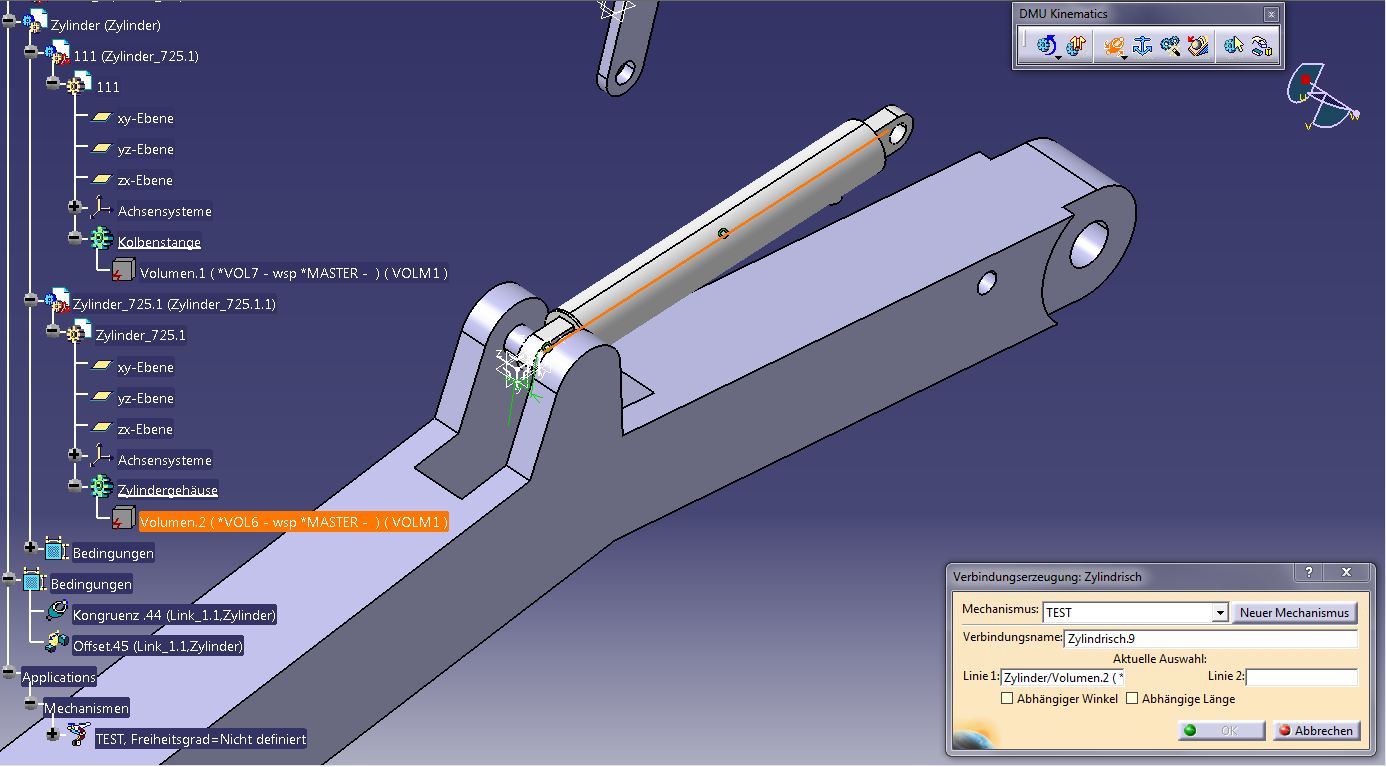
Habe einen Hydraulikzylinder aus V4 in V5 importiert und möchte es in DMU Kinematics simulieren. Leider kann ich bei der "Zylinder-Verbindung keine zwei Achsen anklicken, d.h. eine Achse kann ich auswählen und die andere erkennt es nicht. Wie kann ich das Problem lösen? Habe ich falsch importiert?
Importiert habe ich so: Catia V4 geladen>Master kopiert>im neuen Part bei Hauptkörper spezial eingefügt dabei "CATIA_SPEC" angewählt. Anschließend wurden mir zwei Volumen eingefügt. Einen unter Hauptkörper und das andere unter Körper 2. Habe die zwei Volumen unabhängig voneinhander gespeichert, indem ich das eine und dannach das andere gelöscht habe. so hatte ich das zwei Parts ("Kolbenstange" und "Zylindergehäuse") Ich hoffe konnte gut erklären, vielen Dank für die Hilfe Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
thomasacro
Ehrenmitglied V.I.P. h.c.
Ingenieur Anwendungsberater

Beiträge: 3734
Registriert: 12.05.2004 V4
V5 2016 - 2020
V6 2016x -2019x
|
erstellt am: 28. Okt. 2009 22:13 <-- editieren / zitieren --> Unities abgeben: Nur für RBB86 
Hi, RBB Nur mal ein Versuch: Kann sein, dass deine beiden Achsen deckungsgleich liegen und du die eine unter der anderen nicht triffst. Selektiere die eine, packe das Part ins no-show um dann die Achse des anderen Parts selektieren zu können. Probier mal obs klappt... ------------------
gruß, Tom  Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
moppesle
Ehrenmitglied V.I.P. h.c.
Konstrukteur
Beiträge: 3438
Registriert: 28.05.2009 CATIA V5 R19 SP9
WIN 7 64bit
|
erstellt am: 28. Okt. 2009 22:21 <-- editieren / zitieren --> Unities abgeben: Nur für RBB86
|
thomasacro
Ehrenmitglied V.I.P. h.c.
Ingenieur Anwendungsberater
Beiträge: 3734
Registriert: 12.05.2004 V4
V5 2016 - 2020
V6 2016x -2019x
|
erstellt am: 28. Okt. 2009 22:29 <-- editieren / zitieren --> Unities abgeben: Nur für RBB86
|
RBB86
Mitglied
S
Beiträge: 79
Registriert: 07.04.2009 Win.7x64
V5R17
|
erstellt am: 28. Okt. 2009 22:29 <-- editieren / zitieren --> Unities abgeben:
Hallo, @thomasacro:
danke für deinen Tip, leider klappt es auch nicht. Habe die Teile explodieren lassen. Die Achsen erkennt es dennoch nicht
@moppesle:
was meist du mit Hilfegeometrie? Leider kenne ich es noch nicht! Oder meinst du, dass man die Maße abnimmmt und das Teil separat nachzeichnet? Gruß
RBB Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
thomasacro
Ehrenmitglied V.I.P. h.c.
Ingenieur Anwendungsberater
Beiträge: 3734
Registriert: 12.05.2004 V4
V5 2016 - 2020
V6 2016x -2019x
|
erstellt am: 28. Okt. 2009 22:33 <-- editieren / zitieren --> Unities abgeben: Nur für RBB86
Ach... nun seh ichs: Nimm beide Parts aus der Baugruppe Zylinder raus und bringe sie unter das Hauptprodukt. Leider klappt die Kinematik schlecht mit verschachtelten Baugruppen. ------------------
gruß, Tom Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
RBB86
Mitglied
S
Beiträge: 79
Registriert: 07.04.2009 Win.7x64
V5R17
|
erstellt am: 28. Okt. 2009 22:38 <-- editieren / zitieren --> Unities abgeben:
@thomasacro: danke, das habe ich befürchtet. Die Simulation funktioniert dann. ABER: wie sieht dann mein Baum aus? Jeder Zylinder besteht aus zwei Parts. Wenn ich alle meine Zylinder unterbringen möchte, werde ich und der Betrachter kein Überblick haben. Kann man die Zylinder wo anders unterbringen, so dass die Sim. funktioniert? Gruß Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
thomasacro
Ehrenmitglied V.I.P. h.c.
Ingenieur Anwendungsberater
Beiträge: 3734
Registriert: 12.05.2004 V4
V5 2016 - 2020
V6 2016x -2019x
|
erstellt am: 28. Okt. 2009 22:42 <-- editieren / zitieren --> Unities abgeben: Nur für RBB86
ich hab nun länger nicht mehr mit der kin gewerkelt  . Bau die mal unter dem Produkt des Zylinders isoliert einen Mechanismus auf, nachdem du dann den/die Zylinderprodukt/e in dein Oberprodukt eingebaut hast führe mal "import Mechanism" aus. Dann haste glaube ich aber nur die Simulationen, nicht die Mechanismen (glaub ich...) ------------------
gruß, Tom Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
bgrittmann
Moderator
Konstrukteur
    
Beiträge: 12179
Registriert: 30.11.2006 CATIA V5R19
|
erstellt am: 28. Okt. 2009 22:52 <-- editieren / zitieren --> Unities abgeben: Nur für RBB86
Servus AFAIR kannst du auch die Struktur beibehalten und die Unterbaugruppen flexibel machen (Objekt -> Flexibel) Bei größeren Baugruppen hab ich gute Erfahrungen mit der DressUp-Funktion gemacht: Kineamtik mit Skelettteilen aufbauen und richtige Geometrie nur "mitbewegen" lassen. Gruß
Bernd ------------------
Warum einfach, wenn es auch kompliziert geht. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
ogard1
Mitglied
Verfahrenstechniker
Beiträge: 442
Registriert: 12.09.2004 R19 SP2
|
erstellt am: 29. Okt. 2009 09:07 <-- editieren / zitieren --> Unities abgeben: Nur für RBB86
Hallo, 1. Erstelle ein neues CATProduct
2. Insert existing commponent (dein V4 .model mit Kimatik)
4. Design Mode schalten
5. im Baum die Kinematik suchen und kopieren
6. Paste auf Application ( es werden die CATParts erstellt)
7. Kinematik Simulieren
8. das V4 .model entfernen, da V5 Parts vorhanden Gruß
[Diese Nachricht wurde von ogard1 am 29. Okt. 2009 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
RBB86
Mitglied
S
Beiträge: 79
Registriert: 07.04.2009 Win.7x64
V5R17
|
erstellt am: 29. Okt. 2009 16:55 <-- editieren / zitieren --> Unities abgeben:
Hallo, @bgrittmann:
Danke Dir. Habe die Unterbaugruppe flexibel gemacht >> die Simulation funktioniert dennoch nicht (Achsenauswahl nicht möglich)
Dres-UP ist mir leider nicht bekannt. Kannst Du die Vorgehensweise kurz beschreiben??? Bzw. einen Link geben, wo ich es nachlesen kann. @ogard1:
Danke auch. Kannst du es bei Möglichkeit für Catia in deutsch beschreiben? Viele Grüße
RBB
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
ogard1
Mitglied
Verfahrenstechniker
Beiträge: 442
Registriert: 12.09.2004 R19 SP2
|
erstellt am: 29. Okt. 2009 17:53 <-- editieren / zitieren --> Unities abgeben: Nur für RBB86
Hallo, zu nächst die Frage, war in deinem V4 Model die Kinematik schon in V4 aufgebaut?
Falls "Nein" gilt die Beschreibung nicht. 1. Erstelle ein neues CATProduct 2. im Menü "Einfügen" Vorhandene Komponente einfügen - (dein V4 .model mit Kimatik) 3. Model in Entwurfmodus schalten, falls nicht beim öffnen schon passiert
mit Rechte Maus Taste(RMT) auf das Model - Darstellung- Entwurfsmodus selektieren 4. im Baum (unterhalb des Master" den Eintrag für die Kinematik suchen , Kinematik selektieren mit RMT kopieren 5. im Baum "Application" selektieren mit RMT "Einfügen" ( es werden alle für Kinematik relevanten Modele als CATParts erstellt inclusive Mechanismus und Aufbereitung "Dressup) 6. Kinematik Simulieren (den Eintrag wählen mit *_V5) Kanst du das CATProduct hochladen? Gruß
[Diese Nachricht wurde von ogard1 am 29. Okt. 2009 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de
Foren auf CAD.de



 |
|