| | |
 | Gut zu wissen: Hilfreiche Tipps und Tricks aus der Praxis prägnant, und auf den Punkt gebracht für CATIA & Co. |
| | |
 | Schnell, effizient und günstig: Mit der Kisters 3DViewStation 3D Arbeits- und Reparaturanleitungen einfach erstellen und pflegen, eine Pressemitteilung
|
|
Autor
|
Thema: Kinematik mit Regeln (6042 mal gelesen)
|
Schwobaseggele
Mitglied
Student

   Beiträge: 44
Registriert: 16.07.2008
|

 erstellt am: 16. Jul. 2008 22:08
erstellt am: 16. Jul. 2008 22:08  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
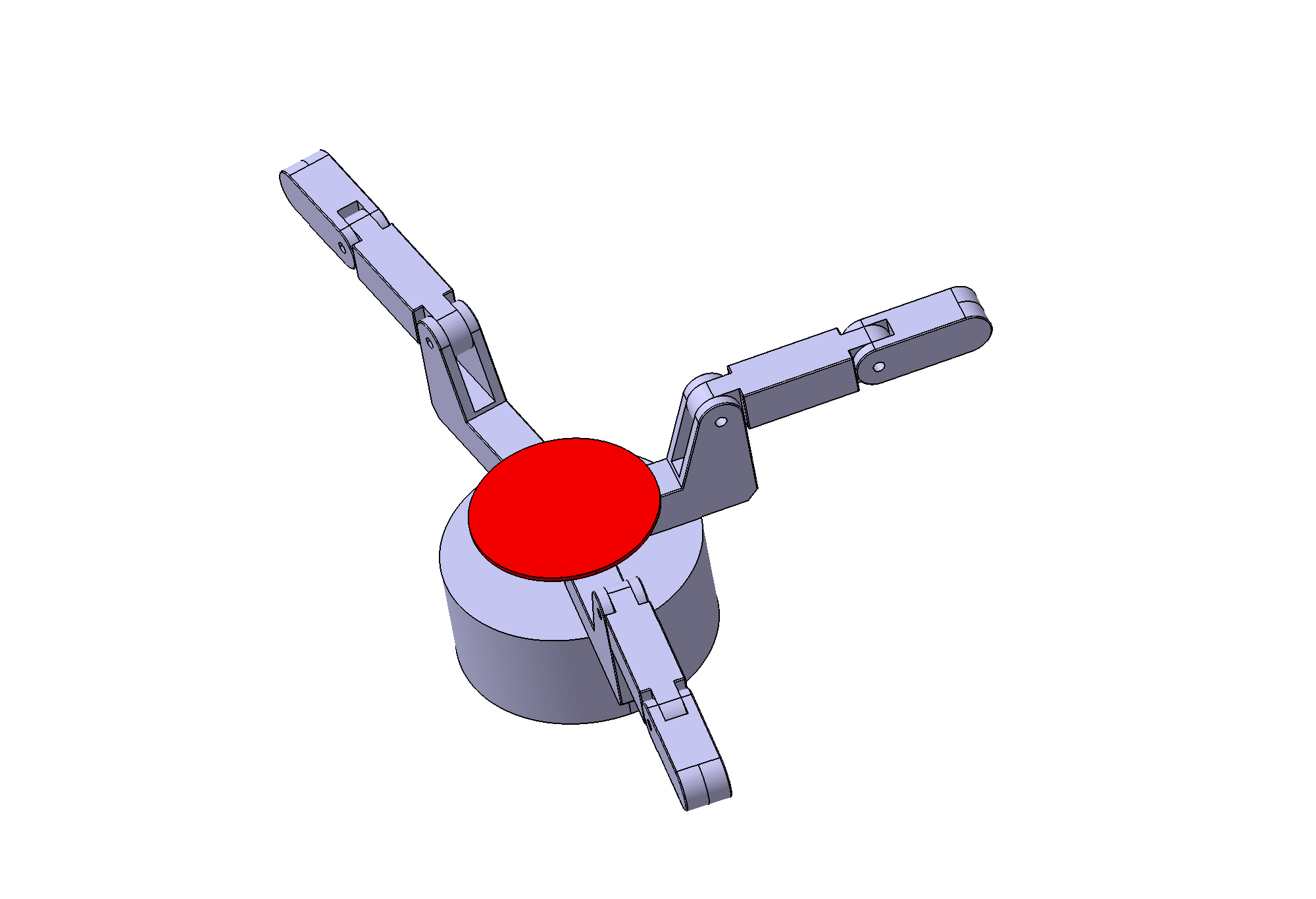
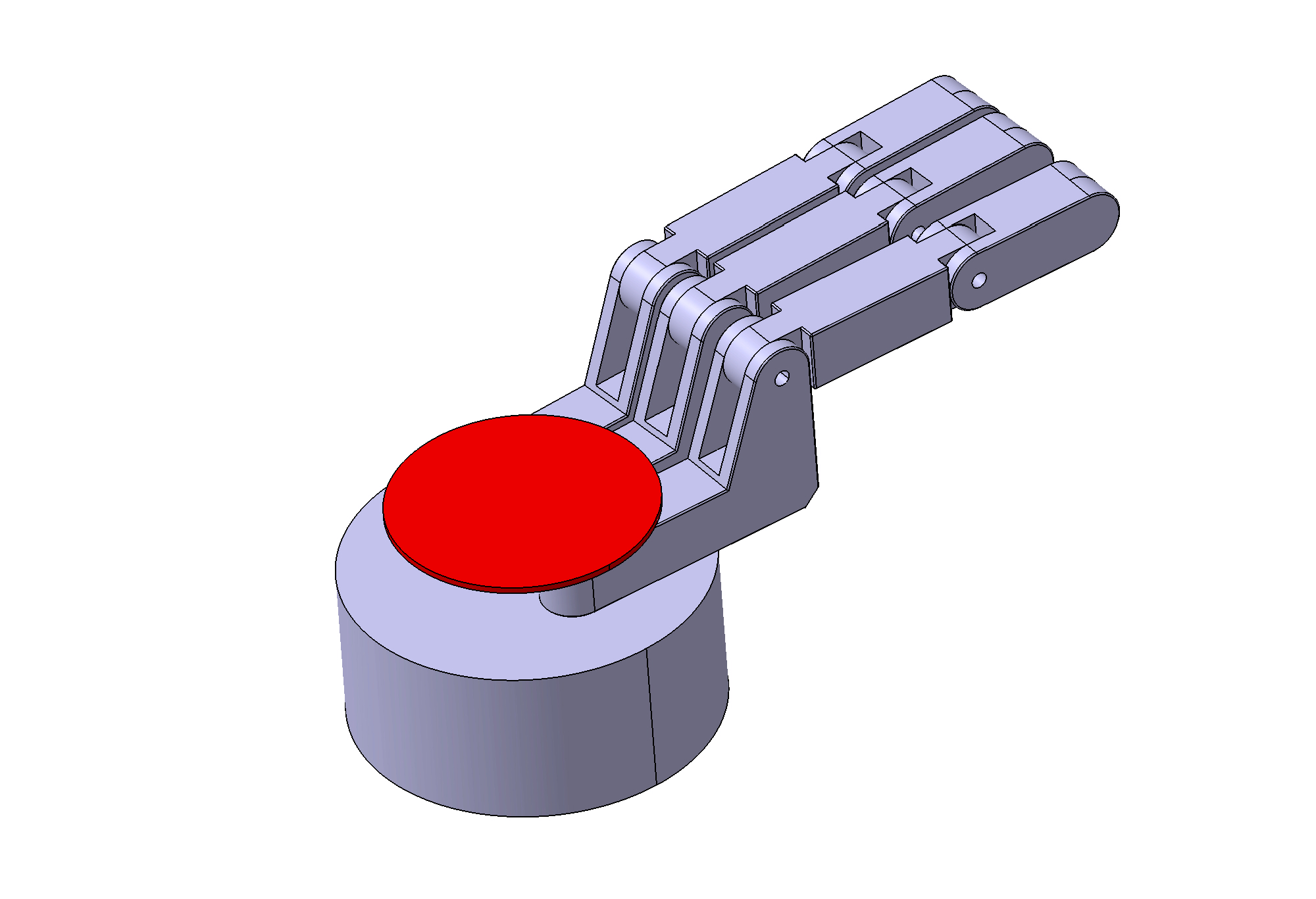
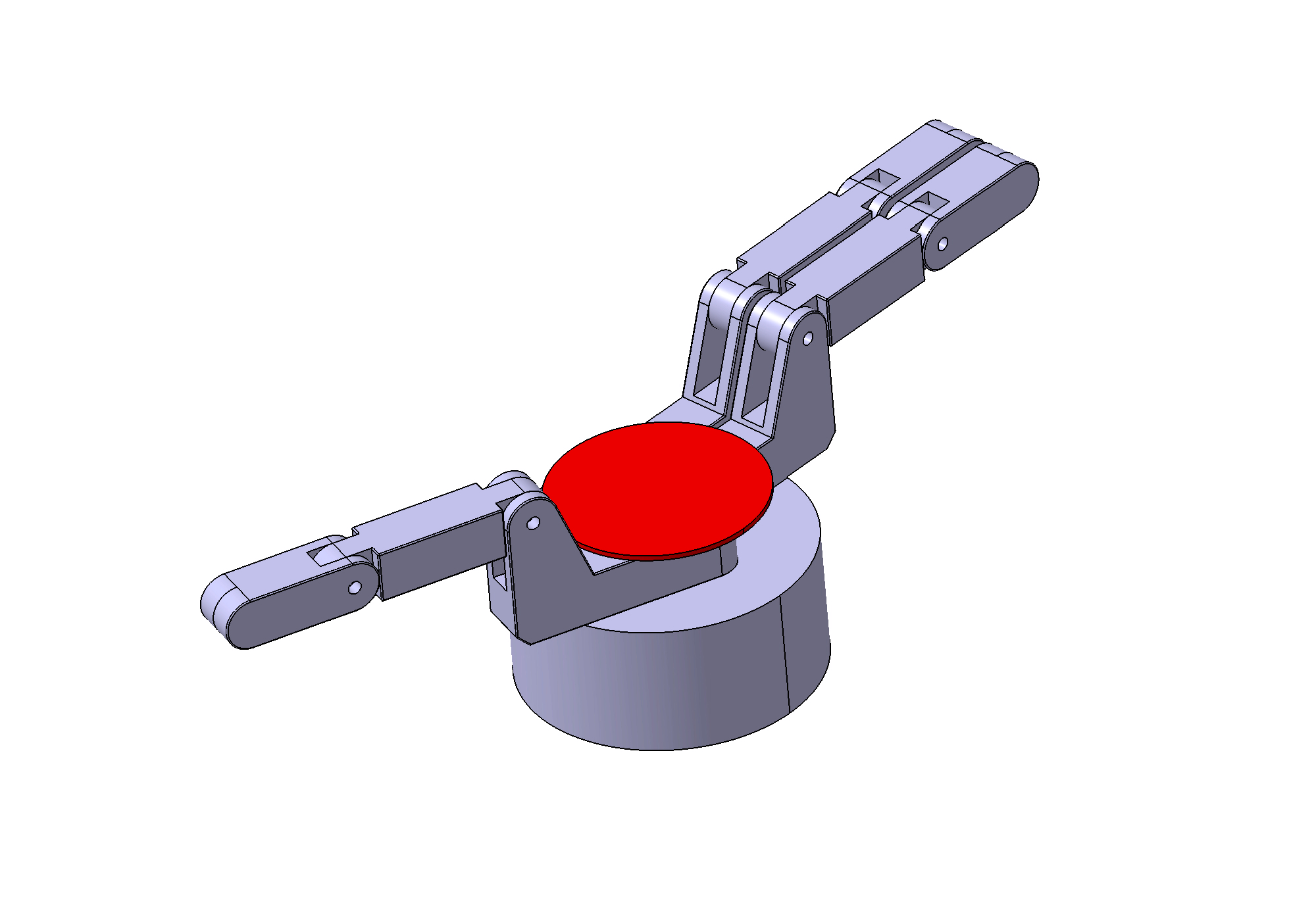
Hallo, hab da mal ne Frage zu einer kleinen Spielerei. Und zwar hab ich einen Handgreifer grob nachmodellier, und möchte diesen nun Bewegen. Hab zwar erfahrung mit der Kinematik, aber bei den Regeln hört es auf. Nun will ich zunächst einmal die Finger rotieren lassen (siehe Bilder) der mittlere Finger ist starr, die zwei äußeren können rotieren. Die zwei äußeren Finger können sich ja dann nur in einem gewissen Bereich bewegen. Kann ich das nur mit der Regel KINTime/s*deg lösen? Oder kann ich dem Finger auch sagen " Kerle du darfst dich nur von Punkt A, 120° zu Punkt B drehen". Oder mach ich so etwas mit Hilfslinien? Wenn ja, wie? Bin Dankbar für alle Antworten mfg Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Mörchen
Ehrenmitglied V.I.P. h.c.
CAD-Trainerin (CATIA V5)

Beiträge: 3830
Registriert: 14.03.2007 Release 19 SP2
|
erstellt am: 17. Jul. 2008 06:45 <-- editieren / zitieren --> Unities abgeben: Nur für Schwobaseggele 
|
Schwobaseggele
Mitglied
Student
Beiträge: 44
Registriert: 16.07.2008
|
erstellt am: 17. Jul. 2008 20:34 <-- editieren / zitieren --> Unities abgeben:
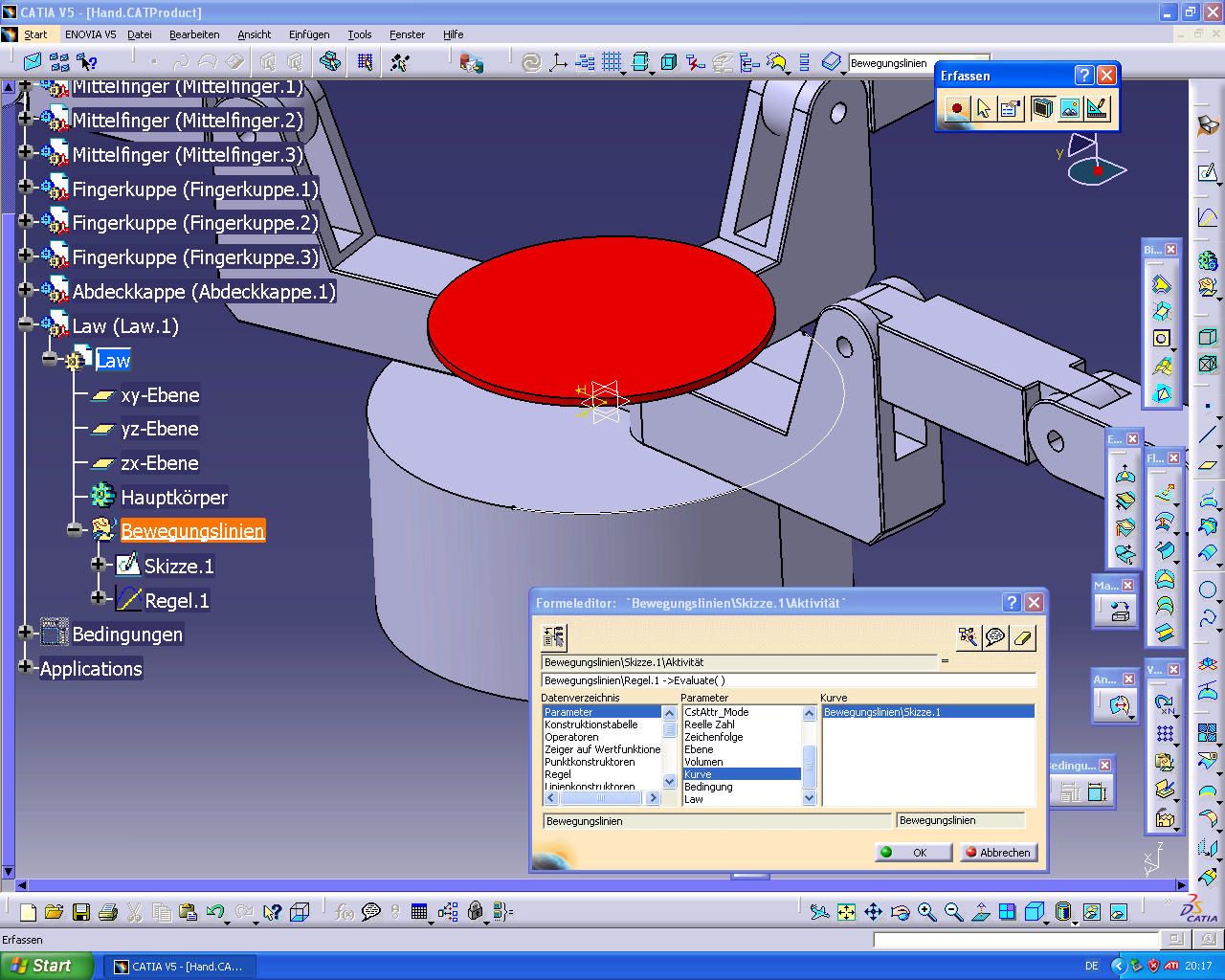
Hallo Mörchen, hab mich mal ein bischen durch das Kinematik- Forum geboxt und hab jetzt auch mal versucht das gefundene auf meinen Greifer anzuwenden. Aber na ja wie es halt meistens so ist will das nicht so recht funktionieren. Genauer gesagt weiß ich nicht was ich in den Formeleditor eintragen muss. Ich hab halt mal eine Skizze erstellt und eine Regel definiert, aber mehr halt net. Du darfst bzw. ihr dürft bei euren erkläeungen ruhig ein bisschen ausschweifen. Hier wird nämlich immer sofort auf das Kinematikbuch vom Michael Schuth hingewiesen und da steht ja auch nicht mehr drin wie in der BILD-Zeitung. Ich mein das ist ja nur ein ganz kleiner Teil aus dem Kinematikbereich. mfg Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Ex-Mitglied

|
erstellt am: 17. Jul. 2008 20:44 <-- editieren / zitieren -->
|
Mörchen
Ehrenmitglied V.I.P. h.c.
CAD-Trainerin (CATIA V5)
Beiträge: 3830
Registriert: 14.03.2007 Release 19 SP2
|
erstellt am: 17. Jul. 2008 20:59 <-- editieren / zitieren --> Unities abgeben: Nur für Schwobaseggele
Hallo Schwobaseggele, ganz kurz eine ERklärung zur Regelskizze, man stellt den Bewegungsablauf grafisch an einer gedachten Zeitachse dar: Wenn Du eine gleichmäßige Drehung um 90° machen willst, brauchst Du eine Linie, die bei 0,0 anfängt und bei 100,90 aufhört. In horizontaler Richtung musst Du Dir den Zeitverlauf (100sec) vorstellen. Wenn Du das Deinem Befehl für die Drehung zuordnest, macht das Gelenk eine schöne Drehung. Gruß
Mörchen
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Schwobaseggele
Mitglied
Student
Beiträge: 44
Registriert: 16.07.2008
|
erstellt am: 17. Jul. 2008 21:03 <-- editieren / zitieren --> Unities abgeben:
Ja, an dem hab ich mich ja orientiert. Und da heist es ja bei der letzten Formeleditoreingabe "PARAMETER- TIME und die KINTime raussuchen", bei mir erscheint bei Parameter keine Time und deshalb auch kein KINTime. Ich scheitere gerade nur an dem Formeleditor. Ein schönes PDF Tutorium zu diesem Thema wär mal ne feine sach. Ich würde auch ne Packung Spätzlen springen lassen. lg s Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Mörchen
Ehrenmitglied V.I.P. h.c.
CAD-Trainerin (CATIA V5)
Beiträge: 3830
Registriert: 14.03.2007 Release 19 SP2
|
erstellt am: 18. Jul. 2008 06:16 <-- editieren / zitieren --> Unities abgeben: Nur für Schwobaseggele
|
Schwobaseggele
Mitglied
Student
Beiträge: 44
Registriert: 16.07.2008
|
erstellt am: 18. Jul. 2008 08:28 <-- editieren / zitieren --> Unities abgeben:
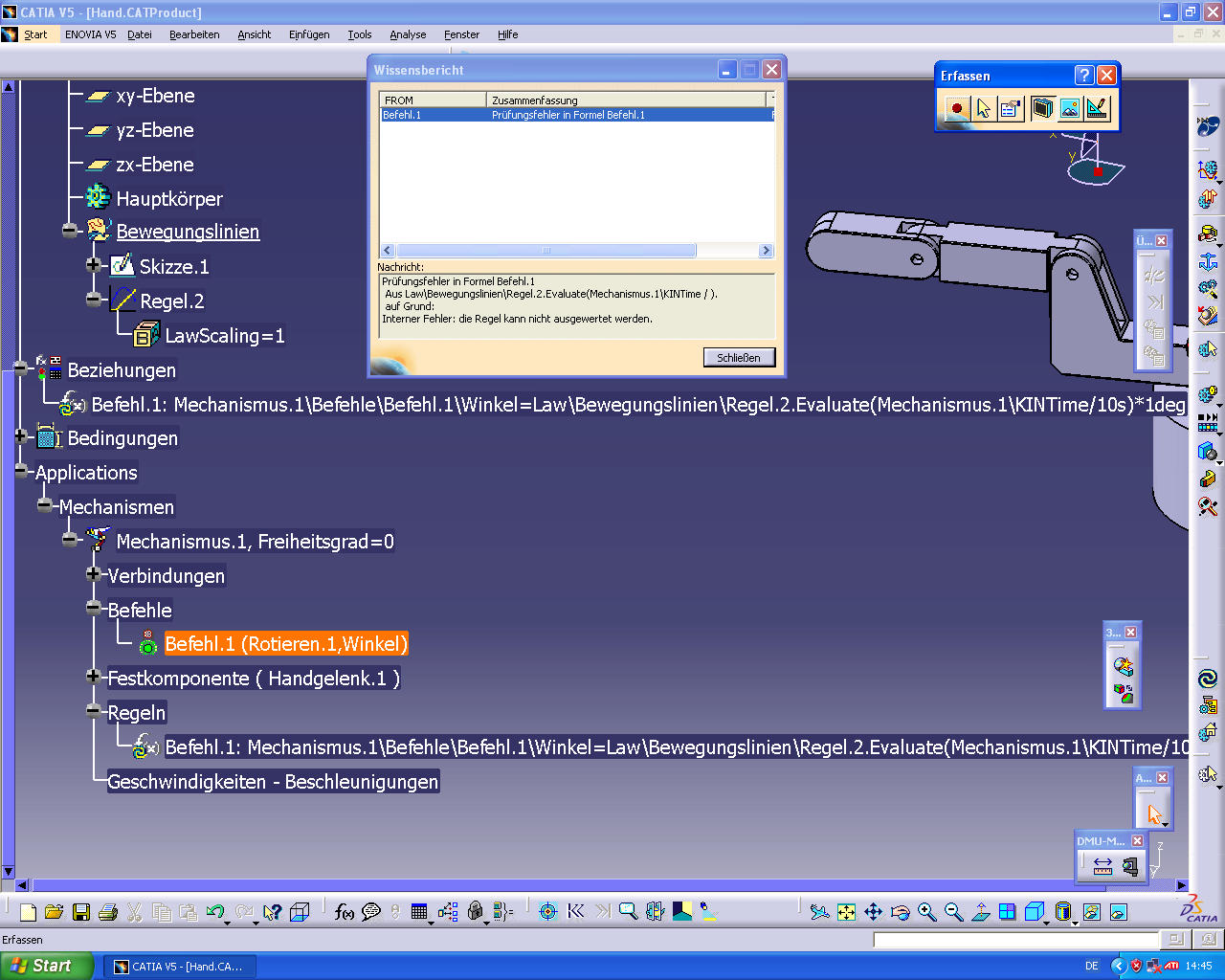
Guten Morgen, ich hab das jetzt alles so hinbekommen, aber die Tante Catia bringt immer ne Fehlermeldung. Ich muss mir das nochmals anschauen, aber davor muss ich noch ein paar Klausuren schreiben. Aber THX für die Bemühungen. Wenn ich das mit dem Greifer hinbekommen sollte mach ich daraus ein schönes PDF Tutorium, für all die ahnungslosen Studenten.:) Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Schwobaseggele
Mitglied
Student
Beiträge: 44
Registriert: 16.07.2008
|
erstellt am: 18. Jul. 2008 15:05 <-- editieren / zitieren --> Unities abgeben:
|
Ex-Mitglied
|
erstellt am: 18. Jul. 2008 16:13 <-- editieren / zitieren -->
|
Schwobaseggele
Mitglied
Student
Beiträge: 44
Registriert: 16.07.2008
|
erstellt am: 18. Jul. 2008 22:16 <-- editieren / zitieren --> Unities abgeben:
Ha haaa, habs endlich hinbekommen. Na ja aber jetzt geht es über zur zweiten Stufe. Die Fingerglieder müssen ja auch bewegt werden. Ist es möglich das ich mehrere Bewegungsbahnen über einer Zeitachse laufen lassen kann? Also das beispielsweise sich ein Finger dreht und sich gleichzeitig das vordere Fingerglied? Oder muss ich solche Späße dann über die Sequenzen regeln. Grüße schseg Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Mörchen
Ehrenmitglied V.I.P. h.c.
CAD-Trainerin (CATIA V5)
Beiträge: 3830
Registriert: 14.03.2007 Release 19 SP2
|
erstellt am: 18. Jul. 2008 22:35 <-- editieren / zitieren --> Unities abgeben: Nur für Schwobaseggele
Hallo Schwobaseggele, Du kannst jeden Befehl mit dem gleichen Prinzip bewegen, also pro Befehl ein Gesetz. Eine Sequenz brauchst Du nicht.
Wenn Du mit grafischen Gesetzen arbeitest, muss jeder Graph gleich lang sein, damit er im gleichen Zeitraum abläuft. Gruß
Mörchen Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Schwobaseggele
Mitglied
Student
Beiträge: 44
Registriert: 16.07.2008
|
erstellt am: 19. Jul. 2008 05:56 <-- editieren / zitieren --> Unities abgeben:
|
Schwobaseggele
Mitglied
Student
Beiträge: 44
Registriert: 16.07.2008
|
erstellt am: 19. Jul. 2008 11:40 <-- editieren / zitieren --> Unities abgeben:
Hallöchen, Ich hab da nochmals ne Frage. Und zwar, wenn ich eine Regel erstelle, die Beziehung dazu und es dann Verknüpfe, erstellt mir Catia nochmals eine Regel. Diese Regel wird dann auch plötzlich in meiner Formel verwendet. Warum erstellt Catia nochmals eine neue Regel? Oder mach ich da etwas falsch? Grüße vom jungen Gemüße Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Schwobaseggele
Mitglied
Student
Beiträge: 44
Registriert: 16.07.2008
|
erstellt am: 20. Jul. 2008 20:41 <-- editieren / zitieren --> Unities abgeben:
Soooo, hallöchen Ich hab meinen Greifer jetzt endlich fertig, na die Grobversion. Für alle interessierten hab ich mal eine ZIP Datei hochgeladen. Und es wär echt nett wenn die ganzen Profis sich das auch mal anschauen könnten. Ich glaub nämlich das da noch ne menge Fehler drin sind. Es wär schön wenn ich von euch eine Kritik oder Anregungen bekommen könnte. Vielen Dank schon mal im voraus.
Tschö mit Ö Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Ex-Mitglied
|
erstellt am: 20. Jul. 2008 20:59 <-- editieren / zitieren -->
|
Schwobaseggele
Mitglied
Student
Beiträge: 44
Registriert: 16.07.2008
|
erstellt am: 20. Jul. 2008 21:41 <-- editieren / zitieren --> Unities abgeben:
|
Mörchen
Ehrenmitglied V.I.P. h.c.
CAD-Trainerin (CATIA V5)
Beiträge: 3830
Registriert: 14.03.2007 Release 19 SP2
|
erstellt am: 21. Jul. 2008 09:49 <-- editieren / zitieren --> Unities abgeben: Nur für Schwobaseggele
Hallo Schwobaseggele, Du hast es etwas umständlich gemacht: für jedes Gelenk einen extra Mechanismus und dann mit Hilfe einer Sequenz alle Mechanismen gleichzeitig ablaufen lassen. Geht schon, ist aber von hinten durch die Brust geschossen...  Normalerweise hat man alle Gelenke in einem Mechanismus. Wenn Du hier die Regeln einsetzt, laufen die Bewegungen von alleine gleichzeitig ab. Die Sequenz kann man sich sparen. Gruß
Mörchen Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Schwobaseggele
Mitglied
Student
Beiträge: 44
Registriert: 16.07.2008
|
erstellt am: 21. Jul. 2008 17:01 <-- editieren / zitieren --> Unities abgeben:
Hallo Mörchen, Erstmals dankeschön für die Kritik und eigentlich hast du ja recht, aber ich wollte mir die Option offen lassen die Finger eventuell unterschiedlich zu bewegen. Aber hast du vielleicht eine Antwort warum Catia nach meiner Verknüpfung nochmals eine Regel erstellt? Ich hab zuerst die Regel erstellt, dann die Bezihung formuliert und danach hab ich verknüpt. Und nach dem verknüpfen erschien immer noch eine zusätzliche Regel. Woher kommt das, oder Warum macht das Catia?
mfg Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Mörchen
Ehrenmitglied V.I.P. h.c.
CAD-Trainerin (CATIA V5)
Beiträge: 3830
Registriert: 14.03.2007 Release 19 SP2
|
erstellt am: 21. Jul. 2008 18:25 <-- editieren / zitieren --> Unities abgeben: Nur für Schwobaseggele
Hallo Schwobaseggele, das eine schließt das andere micht aus, Du kannst die Gelenke ja immernoch einzeln bewegen... Die neu entstandene Rule ist dem Mechanismus zugeordnet, die andere nicht. Gruß
Mörchen Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de
Foren auf CAD.de



 |
|