| | |
 | CATIA V5 Grundkurs | Einsteiger - 5 Std. 15 Min 48 |
| | |
 | Wie eine leistungsfähige Visualisierung das Model Based Enterprise , eine Pressemitteilung
|
|
Autor
|
Thema: Bekomme eine Kinematik Simulation nicht hin (inkl. File) (1411 mal gelesen)
|
Jebus
Mitglied
   Beiträge: 7
Registriert: 14.11.2007
|

 erstellt am: 07. Jan. 2008 20:22
erstellt am: 07. Jan. 2008 20:22  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
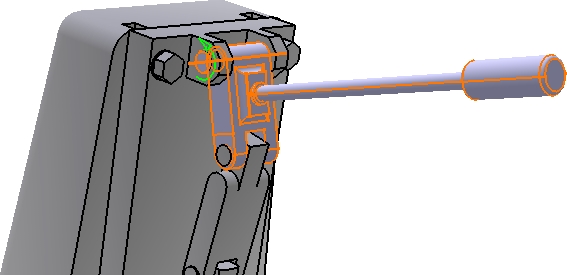
Hallo, wir haben die Aufgabe eine Presse zu konstruieren und diese dann mit Kinematics zu simulieren. Allerdings bekomme ich letzteres nicht hin. Hab alle gelenkigen Teile mit Hilfe von rotierenden Verbindungen verknüpft, was soweit auch geht. Ich bekomms aber nicht hin, diesen Pressbolzen sich längs seiner Achse bewegen zu lassen. Bekomme immer Fehlermeldungen von Catia, dass der Mechanismus dann nicht mehr simulierbar ist. Habs mit einer zylindrischen Verbindung versucht, was für mich am einleuchtensten war. Wäre nett wenn ihr mir dabei helfen könntet, Datei ist angehängt (Product1.CATProduct) PS: Ich weiss, dass das ganze nicht sehr professionell gemacht ist, weshalb ich mich freuen würde, wenn ihr mich evtl noch auf die gröbsten Fehler in der Gesamtkonstruktion aufmerksam machen könntet. Danke und Gruß Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Mörchen
Ehrenmitglied V.I.P. h.c.
CAD-Trainerin (CATIA V5)

Beiträge: 3830
Registriert: 14.03.2007 Release 19 SP2
|
erstellt am: 07. Jan. 2008 20:37 <-- editieren / zitieren --> Unities abgeben: Nur für Jebus 
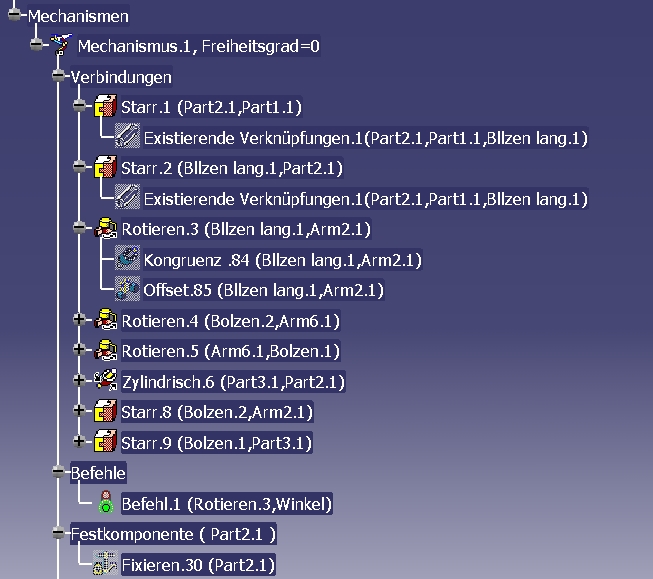
Hallo Jebus, ich habs mal schnell aufgemacht, aber noch nicht simuliert. Du machst einen Denkfehler: Das Modell ist eine geschlossene kinematische Kette. Das bedeutet, dass alle Bewegungen voneinander abhängig sind. Wenn Du den Hebel betätigst, sind alle anderen Bewegungen erzwungen. Du hast zwar jetzt den Freiheitsgrad 0, hast den aber mit zuvielen Befehlen erreicht. Nur auf der ersten Rotation darf ein Befehl kommen. Alle anderen Befehle müssen gelöscht werden. Die Freiheitsgrade müssen mit geeigneten Gelenken weggenommen werden. Mit dem zylindrischen Befehl liegst Du schon ganz richtig. Wenn Du das Release 17 hast, kann ich es Dir korrigieren und zurückschicken, falls Du es mit diesen Hinweisen nicht hinkriegst. Gruß
Mörchen Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Mörchen
Ehrenmitglied V.I.P. h.c.
CAD-Trainerin (CATIA V5)
Beiträge: 3830
Registriert: 14.03.2007 Release 19 SP2
|
erstellt am: 07. Jan. 2008 20:59 <-- editieren / zitieren --> Unities abgeben: Nur für Jebus
Hallo Jebus, ich habs jetzt ausprobiert: Du brauchst 3 Drehgelenke und ein zylindrisches Gelenk. Auf die erste Rotation einen Befehl. Für den Anfang würde ich erstmal die Bolzen weglassen (ins Hide stellen)und die Gelenke zwischen den jeweiligen Bohrungen erstellen. Wenn der Mechanismus simulierfähig ist, kannst Du die Bolzen mit je einer Rotation (mit Befehl, weil diese Drehung sich nicht ergibt) verbinden, oder, weil die Rotationen der Bolzen vielleicht nicht so wichtig ist, einfach mit einer starren Verbindung zu einem Glied verknüpfen. Prinzipiell ist nur der erste Rotationsbefehl ausschlaggebend, die Bewegung der Bolzen ist unerheblich. Aber wenn Du sie mit Drehgelenken einbindest brauchst Du jeweils einen Befehl, um den Freiheitsgrad 0 zu erreichen. (Bißchen kompliziert erklärt, aber eigentlich ganz einfach) Gruß
Mörchen Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Jebus
Mitglied
Beiträge: 7
Registriert: 14.11.2007
|
erstellt am: 07. Jan. 2008 21:54 <-- editieren / zitieren --> Unities abgeben:
Habs jetzt nach deiner Anleitung versucht, bekomms aber nicht hin. Also ich habe im obersten Gelenk eine Drehverbindung gemacht. Mit "Befehl" meinst du dann in dem Fall, dass ich "Abhängiger Winkel" markiere richtig? Das habe ich dann auch gemacht. Bei den andern beiden Gelenken habe ich das gleiche gemacht, nur dass ich dort den Haken bei "Abhängiger Winkel" nicht gesetzt habe. Ich denke so hast du das gemeint. Wenn ich dann aber eine zylindrische Verbindung mit der Bohrung und dem Pressbolzen erzeugen will, sagt er mir, dass der Mechanismus überbestimmt sei (egal ob ich Befehle angebe oder nicht). Was mache ich falsch? Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Mörchen
Ehrenmitglied V.I.P. h.c.
CAD-Trainerin (CATIA V5)
Beiträge: 3830
Registriert: 14.03.2007 Release 19 SP2
|
erstellt am: 07. Jan. 2008 22:06 <-- editieren / zitieren --> Unities abgeben: Nur für Jebus
Hallo Jebus, was jetzt falsch ist, kann ich von hier aus nicht sagen...
Ich schick Dir mal das Modell zurück, dann kannst es Dir anschauen, falls Du das Release 17 hast.
Vielleicht hast Du mal eine falsche Achse erwischt und das Teil klemmt... Gruß
Mörchen PS: abhängiger Winkel / Länge sind Befehle [Diese Nachricht wurde von Mörchen am 07. Jan. 2008 editiert.] [Diese Nachricht wurde von Mörchen am 07. Jan. 2008 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Jebus
Mitglied
Beiträge: 7
Registriert: 14.11.2007
|
erstellt am: 07. Jan. 2008 22:19 <-- editieren / zitieren --> Unities abgeben:
|
Mörchen
Ehrenmitglied V.I.P. h.c.
CAD-Trainerin (CATIA V5)
Beiträge: 3830
Registriert: 14.03.2007 Release 19 SP2
|
erstellt am: 07. Jan. 2008 22:35 <-- editieren / zitieren --> Unities abgeben: Nur für Jebus
|
Mörchen
Ehrenmitglied V.I.P. h.c.
CAD-Trainerin (CATIA V5)
Beiträge: 3830
Registriert: 14.03.2007 Release 19 SP2
|
erstellt am: 07. Jan. 2008 22:36 <-- editieren / zitieren --> Unities abgeben: Nur für Jebus
|
Jebus
Mitglied
Beiträge: 7
Registriert: 14.11.2007
|
erstellt am: 07. Jan. 2008 23:29 <-- editieren / zitieren --> Unities abgeben:
Habs genau so gemacht wie du meintest, Fehler ist immernoch derselbe, "Mechanismus überbestimmt" wenn ich die zylindrische Verbindung erstellen will. Hab mal meine bisherige Simulation hochgeladen. Wenn man jetzt versucht die letzte Verbindung zu erstellen kommt der Fehler oder ist das nur bei mir so? Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
bgrittmann
Moderator
Konstrukteur
    
Beiträge: 12179
Registriert: 30.11.2006 CATIA V5R19
|
erstellt am: 08. Jan. 2008 07:04 <-- editieren / zitieren --> Unities abgeben: Nur für Jebus
Servus Jebus Könntest du bitte in deinem Profil die Systeminfos zum Rechner und die CATIA Version eintragen? (ich hätt mir mal wieder den Download sparen können) Gruß
Bernd ------------------
Warum einfach, wenn es auch kompliziert geht. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Ex-Mitglied

|
erstellt am: 08. Jan. 2008 08:25 <-- editieren / zitieren -->
HAllo zusammen, @Jebus:
Es hat sich bewährt, bei der Modellierung des Getriebes in folgender reihenfolge vorzugehen:
- Gelenke (Verbindungen) ohne Antriebe
- Festes Teil
- Befehle Viele Grüße, CEROG ------------------
CATIA-FAQ http://www.cad-gaenssler.de |
Mörchen
Ehrenmitglied V.I.P. h.c.
CAD-Trainerin (CATIA V5)
Beiträge: 3830
Registriert: 14.03.2007 Release 19 SP2
|
erstellt am: 08. Jan. 2008 10:03 <-- editieren / zitieren --> Unities abgeben: Nur für Jebus
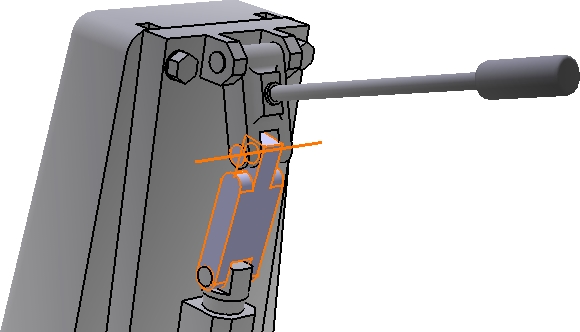
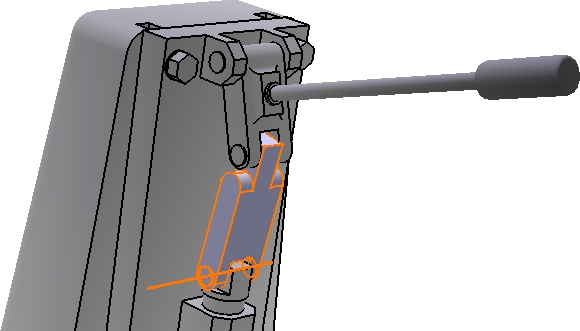
Hallo Jebus, die Lösung ist ganz banal: es passt nicht in den Maßen.
Faange mal "unten" mit der zylindrischen Verbindung an. Am besten baust Du es im Assembly vorher zusammen (von unten), dann wirst Du sehen, dass Du beim oberen Rotationsgelenk kein Offset 0mm mehr hinkriegst, sondern -0,17mm. Danach entferne alle Assembly-Bedingungen, die Du erzeugt hast, verschieb die Teile aber nicht. Bei der ersten Rotation klickst Du dann im Definitionsfenster auf "Offset" anstatt auf "Null-Offset". Dann übernimmt CATIA den aktuellen Abstand. Wenn Du ganz faul bist, kannst Du den Befehl "Umwandlung von Baugruppenbedingungen" (unter/neben Anker in der Symbolleiste) ausprobieren, wenn Du die Asembly-Bedingungen hast. Dan wird CATIA allerdings auch die Schrauben beweglich reinmachen. Außerdem lernt man damit nix... Gruß
Mörchen Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Jebus
Mitglied
Beiträge: 7
Registriert: 14.11.2007
|
erstellt am: 08. Jan. 2008 13:47 <-- editieren / zitieren --> Unities abgeben:
Ok Danke, das hat mich weitergebracht  . Bin mir zwar nicht ganz sicher wie ich es geschafft hab, aber es läuft. Jetzt eine weitere Frage, ich möchte an die Seite der Presse kleine Füsschen dranmachen, die dann zusätzlich mit der Seitenfläche der Presse verrundet werden sollen. Dadurch, dass ich an der Seite aber eine Auszugsschräge habe,weiss ich nicht wie ich meine Blöcke für die Füße, mit den schrägen Seiten der Presse verbinde. Hab eine Datei angehängt. Danke Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Mörchen
Ehrenmitglied V.I.P. h.c.
CAD-Trainerin (CATIA V5)
Beiträge: 3830
Registriert: 14.03.2007 Release 19 SP2
|
erstellt am: 08. Jan. 2008 14:04 <-- editieren / zitieren --> Unities abgeben: Nur für Jebus
Hallo Jebus, Du musst nur dafür sorgen, dass die Füße in den Körper ragen. In Deinem Fall musst Du die Skizze zum Körper hin ordentlich verlängern. (Jetzt hast Du nach oben einen Spalt.) Beim Erstellen des Blocks verschmilzt das Material und danach kannst Du ohne Probleme verrunden. Gruß
Mörchen [Diese Nachricht wurde von Mörchen am 08. Jan. 2008 editiert.] [Diese Nachricht wurde von Mörchen am 08. Jan. 2008 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Jebus
Mitglied
Beiträge: 7
Registriert: 14.11.2007
|
erstellt am: 08. Jan. 2008 16:09 <-- editieren / zitieren --> Unities abgeben:
|

 Foren auf CAD.de
Foren auf CAD.de



 |
|