Hallo

Ich möchte den ABB_340 Roboter neu zusammenbauen, da unsere Datei von Dassault Systems korrupt ist.
Ich arbeite mit Delmia(Device Building und Assembly Design). Die Programmteile sind meines Wissens mit Catia aber identisch.
Nun zu meinem Problem:
Die Rotierende Bewegung der drei Arme hat noch geklappt. Nun möchte ich die Stange(sollen insgesamt 6 werden) so an dem Arm platzieren, dass die Stange gelenkig gelagert ist, aber keine eigenen Freiheitsgrade besitzt.
Das müsste doch eigentlich mit einem "Spherical Joint" gehen, oder?
Ich hab es auf 2 Wege mal probiert:
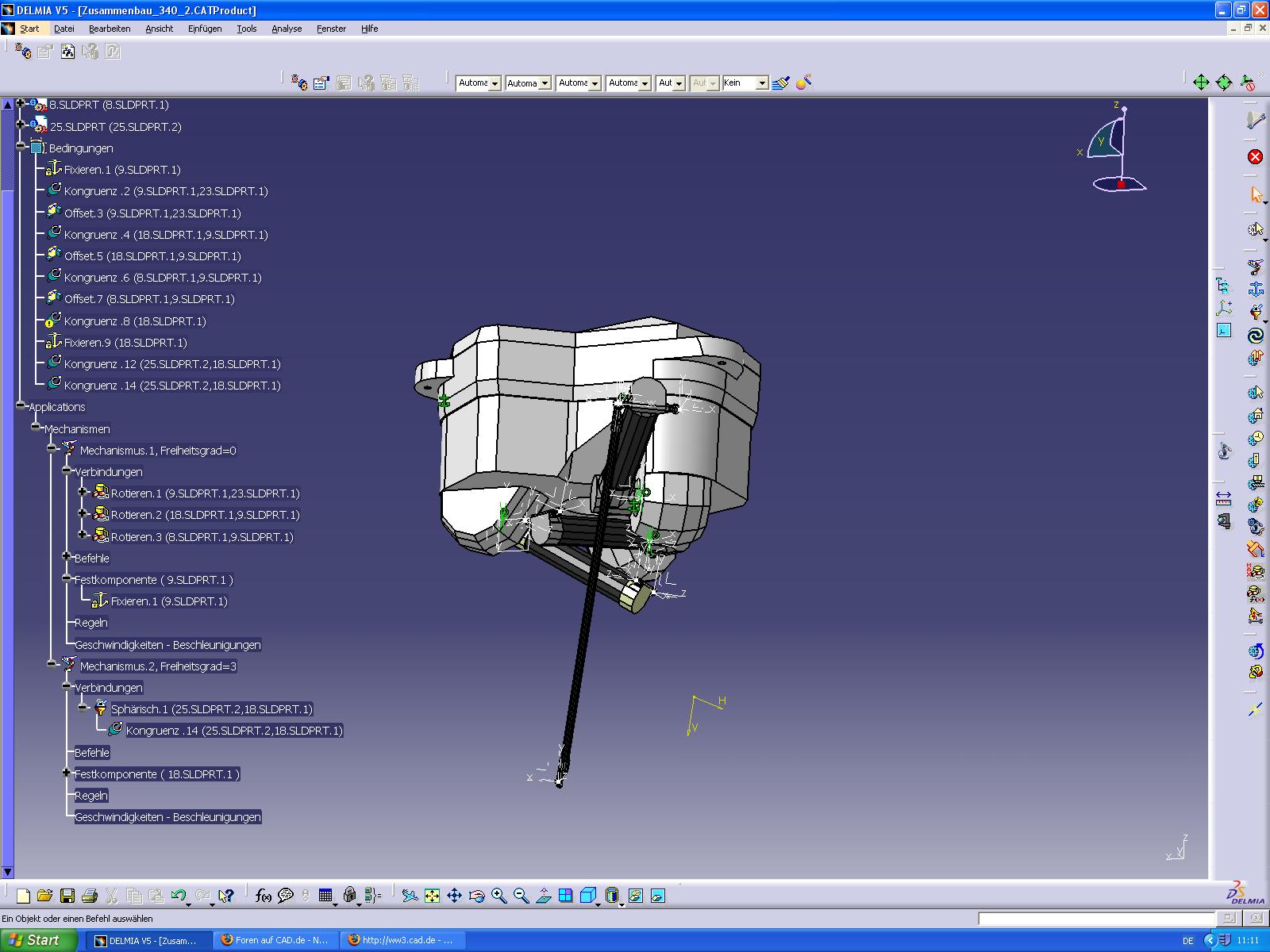
Bild1: Ich hab den Spherical Joint in einen zweiten Mechanismus gepackt. Folge: Bewege ich nun den Arm, bewegt sich die Stange nicht mit. Obwohl ich unter Assembly Design extra eine Constraints festgelegt habe. Eine Kontaktbedingung konnte ich aber komischerweise nicht erzeugen.
Bild2: Ich hab den Spherical Joint in den ersten Mechanismus mit reingepackt. Dann lässt sich aber nix mehr simulieren. Es kommt keine Fehlermeldung. Der Winkel ändert sich einfach nicht.
Ich hoffe ihr könnt mir helfen. Die .CATProduct Dateien durfte ich leider nicht mit hochladen.
Schöne Grüße
Joli
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP

 Foren auf CAD.de
Foren auf CAD.de



 |
|