| | |
 | Qualität sichtbar gemacht, dank leistungsfähiger 3DViewStation Grafik, eine Pressemitteilung
|
|
Autor
|
Thema: Transfer von Bauteilen mit Roboter (6093 mal gelesen)
|
Markao
Mitglied
Ingenieur / Konstruktion

   Beiträge: 11
Registriert: 13.02.2007
|

 erstellt am: 24. Apr. 2007 17:34
erstellt am: 24. Apr. 2007 17:34  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Hallo zusammen, mit einem Roboter soll ein Bauteil transportiert werden. Hierzu soll der Roboter "Position-1" anfahren um das Bauteil aufzunehmen. Danach soll er das Bauteil zu „Position-2“ transportieren und es dort ablegen. Im Anschluss soll der Roboter wieder in seine Ausgangsposition zurückfahren.  Die Kinematik des Roboters zu simulieren ist kein Problem. Doch, wie ist es möglich ein Bauteil nur während einem bestimmten Wegabschnitts mitzunehmen? Die Kinematik des Roboters basiert auf Regeln und ist daher zeitgesteuert. D.h. die Bewegungen sind durch hinterlegte Kurven bestimmt. Bsp: Law.Evaluate(Mechanism.1\KINTime /1s)*1mm. Die einzige Möglichkeit auf die ich gestoßen bin ist es, einen separaten Mechanismus für das Bauteil zu generieren. Dieser Mechanismus ist ebenfalls zeitgesteuert und über KINtime mit dem Robotermechanismus zeitlich gekoppelt. Das heißt, das Bauteil ist nicht wirklich mit dem Roboter geometrisch verbunden, sondern bewegte sich lediglich für eine bestimmte Zeit auf der gleichen „Flugbahn“ wie der Robotergreifer. Die Bewegungskurven hierzu zu generieren ist sehr aufwändig und teilweise unmöglich.
Natürlich ist es möglich durch Dressups oder „Rigid-Verbindungen“ Bauteile an eine Kinematik anzuhängen. Doch soll sich mein Bauteil ja nur für einen bestimmten Zeitraum mit der Kinematik mitbewegen.  Hat jemand diesbezüglich schon Erfahrungen gemacht und eine bessere Idee? Einmal mehr schon im Voraus vielen Dank!!
Markao
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Catrin
Ehrenmitglied
Ingenieurin Maschinenbau/Informatik
Beiträge: 1929
Registriert: 12.12.2000 HP ZBook 15
Windows 7 / V5R24
|
 erstellt am: 25. Apr. 2007 07:54 <-- editieren / zitieren --> Unities abgeben: Nur für Markao
erstellt am: 25. Apr. 2007 07:54 <-- editieren / zitieren --> Unities abgeben: Nur für Markao 
Es gibt im Prinzip zwei Moeglichkeiten. Die eine hast Du schon selbst erkannt - sie ist Dir zu umstaendlich. Nun zu der anderen:
Erzeuge einen zweiten Mechanismus, bei dem der zu transopiertierende Koeprer mit Rigid am Roboter befestigt ist. Erzeuge eine Simulation fuer genau den Zeitraum, in dem der Koeper mit dem Roboter verbunden ist. Kopple die Simulation des Roboters ohne Koerper und die Simulation mit Koerper in einer Sequenzfolge. Muesste dann so aussehen:
Simulation 1: Roboter faehrt zum Koeprer hin
Simulation 2: Roboter nimmt den Koeprer mit
Simulation 3: Roboter faehrt ohne Koerper zurueck Gruss
Catrin ------------------
--------------------------------------------------
cad_de@catrin-eger.de

-------------------------------------------------- Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Markao
Mitglied
Ingenieur / Konstruktion
Beiträge: 11
Registriert: 13.02.2007
|
erstellt am: 25. Apr. 2007 11:11 <-- editieren / zitieren --> Unities abgeben:
Hallo Catrin! Vielen Dank für deinen Vorschlag! Der ist im Prinzip intelligent! 
Beim Versuch diesen Umzusetzen muss ich aber leider feststellen, dass es so nicht ganz funktioniert, da meine Mechanismen/Simulation auf Regeln basiert. Zwar kann ich die gewünschten Positionen zum greifen und abladen des Bauteils anfahren, doch laufen die einzelnen "Commands" der Joints mit konstanter Geschwindigkeit und nicht nach den von mir über grafische Laws definierten Weg/Zeit-Gesetzen. Die von mir über Kurven (grafische Laws) definierten "Weg-Zeit" Beziehungen werden nicht mehr berücksichtigt, sobald ich eine Simulation erstelle in der die Gesamtstrecke bzw. gesamte Ablaufzeit in Teilabschnitte augeteilt ist. Ich denke dein Vorschlag würde wunderbar funktionieren sofern die Mechanik weggesteuert, also über das Verschieben der Schieberegler geregelt wäre. In meinem Model ist aber jeder Joint (Command) in seiner Bewegung zeitlich durch eine separate hinterlegte Kurve geregelt... Über weitere Ideen und Vorschläge würde ich mich freuen! Gruß
Markao Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Catrin
Ehrenmitglied
Ingenieurin Maschinenbau/Informatik
Beiträge: 1929
Registriert: 12.12.2000 HP ZBook 15
Windows 7 / V5R24
|
erstellt am: 25. Apr. 2007 12:24 <-- editieren / zitieren --> Unities abgeben: Nur für Markao
Stimmt nicht. Du musst die Simulation ja nicht ueber die gesamte Zeit laufen lassen.
Erzeuge eine Simulation von Zeitpunkt 1 (0s) bis Zeitpunkt 2 (XXs).
Dann eine Simulation von zeitpunkt XXs bis XXXs mit Koerper.
Dann eine Simulation von XXXs bis XXXXs ohne Koeper mit Zeit.... Simulationen muessen nicht zwangslaeufig bei 0s beginnen. Gruss
Catrin ------------------
--------------------------------------------------
cad_de@catrin-eger.de
-------------------------------------------------- Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Markao
Mitglied
Ingenieur / Konstruktion
Beiträge: 11
Registriert: 13.02.2007
|
erstellt am: 25. Apr. 2007 14:04 <-- editieren / zitieren --> Unities abgeben:
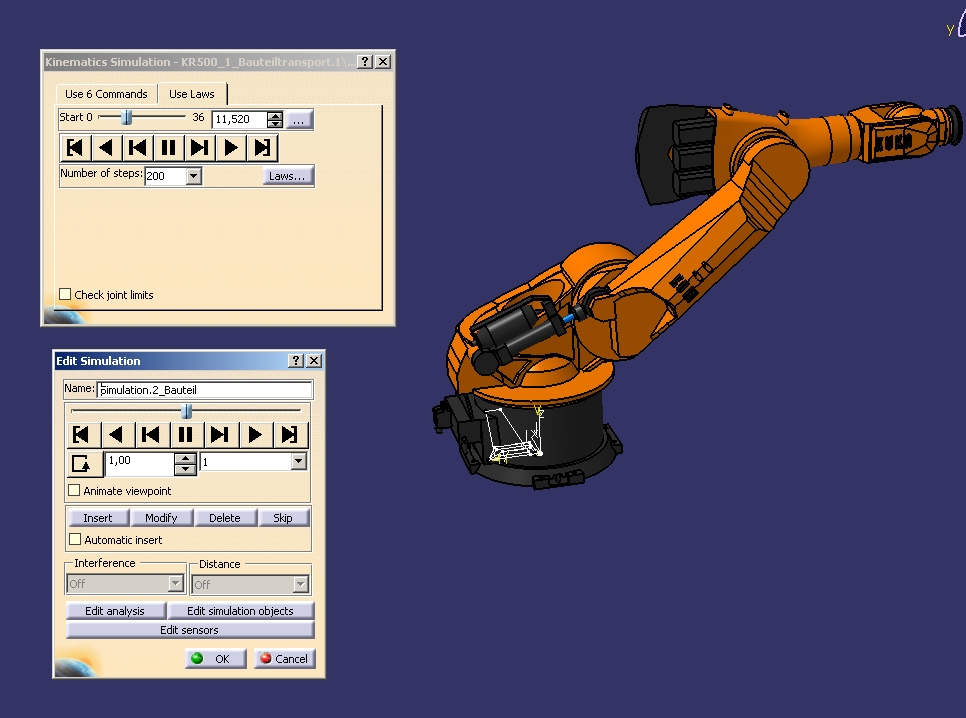
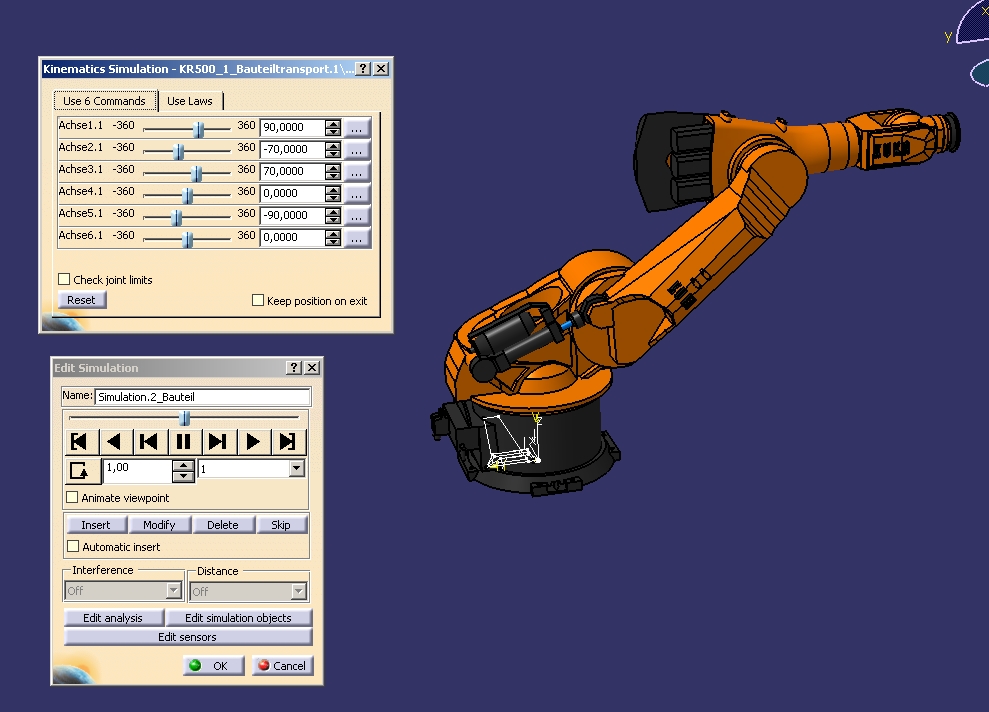
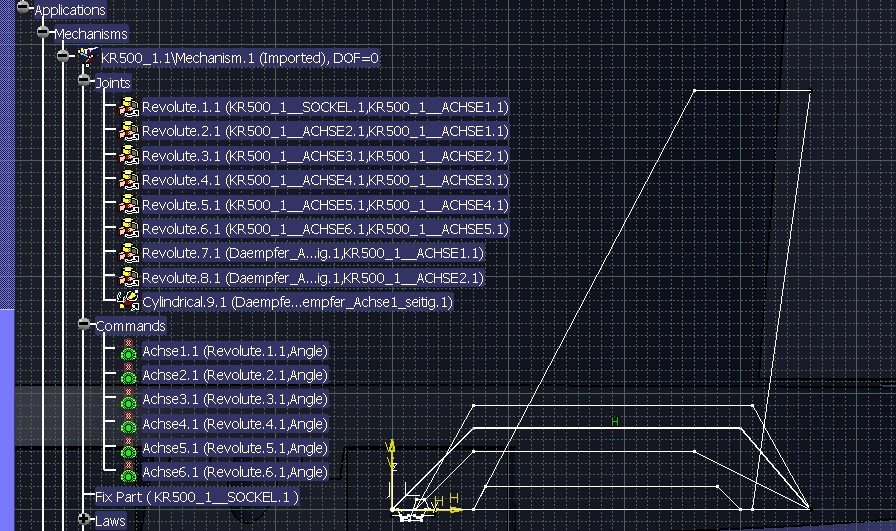
Trotzdem laufen in diesem Fall die einzelnen Commands während eines Teilabschnitts mit konstanter Geschwindigkeit und meine Weg/Zeit-Kurven (Laws) werden nicht mehr berücksichtigt. Catia definiert die Positionen der Kinematik beim Start- und Endzeitpunkt eines jeden Steps. Während der Wiedergabe einer Simulation werden die einzelnen Steps nacheinander abgefahren. Dabei fahren dann die einzelnen Joints bzw. Commands mit konstanter Geschwindigkeit von den Start- zu den Endposition der einzelnen Steps. Die Weg/Zeit-Beziehungen definiert durch grafische Laws werden, so glaube ich, leider nicht mehr berücksichtigt. In meinem Fall besteht einen Roboter mit 6 Gelenken (6 Rotary Joints). Die Bewegung jedes einzelnen Joints ist über ein separates grafisches Law definiert (siehe Anhang). Das heisst, ich habe also 6 Bewegungskurven welche mir die Winkelstellung der Rotary Joints über einem Referenzelement als Zeitachse definieren. Somit habe ich 6 unabhängig von einander gesteuerte Bewegungen. Damit es ein bisschen klarer wird, habe ich Bilder angehängt. Ich finde es sehr schade dass Catia die Weg/Zeit-Beziehungen der Laws nach Generierung einer Simulation mit mehreren Steps nicht mehr berücksichtigt.
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Markao
Mitglied
Ingenieur / Konstruktion
Beiträge: 11
Registriert: 13.02.2007
|
 erstellt am: 25. Apr. 2007 14:06 <-- editieren / zitieren --> Unities abgeben:
erstellt am: 25. Apr. 2007 14:06 <-- editieren / zitieren --> Unities abgeben:
|
bgrittmann
Moderator
Konstrukteur
    
Beiträge: 12179
Registriert: 30.11.2006 CATIA V5R19
|
erstellt am: 25. Apr. 2007 14:55 <-- editieren / zitieren --> Unities abgeben: Nur für Markao
Servus Wenn du die komplette Bewegung des Roboters in einer Simulation zusammengefasst hast, kannst du ja die Bewegung des "Werkstücks" in eine extra Simulation packen.
Über eine Sequenz kannst du dann die Simulationen zusammenfassen (auch mit zeitlichem Versatz). Gruß Bernd Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Markao
Mitglied
Ingenieur / Konstruktion
Beiträge: 11
Registriert: 13.02.2007
|
erstellt am: 25. Apr. 2007 16:14 <-- editieren / zitieren --> Unities abgeben:
Wenn die komplette Bewegung in nur einem Step durchlaufen wird stimmen die einzelnen Teilbewegungen zueinander. Stimmt. NUR: Dann braucht man für das Bauteil wiederum eigene Bewegungskurven, und genau das möchte ich vermeiden. Ist es nicht auf irgendeine Weise möglich das Bauteil nur für einen gewissen Zeitabschnitt an die Mechanik des Roboters anzuhängen? Vielleicht auch mit der Knowledge Advisor Lizenz...? Thanx a lot!! Übrigens: Bei Mechanismen mit Regeln ist es auch möglich den Mechanismus direkt in einer Sequenz abzuspielen ohne ihn zuvor in eine Simulationen umzuwandeln. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Catrin
Ehrenmitglied
Ingenieurin Maschinenbau/Informatik
Beiträge: 1929
Registriert: 12.12.2000 HP ZBook 15
Windows 7 / V5R24
|
erstellt am: 25. Apr. 2007 22:22 <-- editieren / zitieren --> Unities abgeben: Nur für Markao
Du machst bei der Erzeugung der Simulationen einen fehler (der istmir beim Bilder angucken aufgefallen): Fuer die erste Simulation musst Du einstellen: ... im Fenster use Laws ... Limits 0 ... XX (Endzeit bis zur Aufnahme des teiles) ... im fenster Edit Simulation auf Automatic insert ... im fenster use Laws auf den Pfeil vorwaerts .... dann eerzeugt CATIA ganz laessig die richtigen Ablaeufe in der genau von Dir vorgegebenen Zeitspanne... Die zweite Simulation machst Du genauso - ob mit law oder ohne, musst Du entscheiden, wenn ohne Law - machst Du den Schalter automatic insert wieder aus - den brauchst Du (und dann musst Du ihn setzen!) NUR bei Laws. Und dann gehts so wie oben schon mal vorgeschlagen. Gruss
Catrin ------------------
--------------------------------------------------
cad_de@catrin-eger.de
-------------------------------------------------- Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
HolländerD
Mitglied
Dipl. Ing.
Beiträge: 28
Registriert: 24.05.2005
|
erstellt am: 30. Apr. 2007 17:17 <-- editieren / zitieren --> Unities abgeben: Nur für Markao
Hallo "Markao", wie ich vermute wurde bisher schon einige Zeit darauf verwendet mit CATIA Kinematik Funktionalität eine Lösung für die Fragestellung zu finden.
Auch wenn mir die Zielstellung nicht bekannt (und auch unklar) ist:
Hast Du schon mal über den Einsatz einer Mehrkörpersimulation nachgedacht? Hat man das kinematische Modell (wie du es ja bereits erzeugt hast) zur Verfügung kann man dieses sehr einfach mit "dynamischen" Elementen (hier z.B. die Haltekraft, die vermutlich über einen Regler gesteuert wird) ergänzen. Weiterer Vorteil einer solchen Simulation: z.B. werden die Effekte der Massenträgheit ebenfalls abgebildet etc. Gruß
Dominique ------------------
LMS Deutschland GmbH
Dominique.Hollaender@lms-GmbH.de
<http://www.lmsintl.com>
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Markao
Mitglied
Ingenieur / Konstruktion
Beiträge: 11
Registriert: 13.02.2007
|
erstellt am: 02. Mai. 2007 14:17 <-- editieren / zitieren --> Unities abgeben:
Hallo Dominique, mein Ziel ist es einen Bauteiltransfer zu simulieren um eine dynamische Kollisionsprüfung zwischen Bauteil und umliegender Mechanik durchführen zu können. Kräfte interessieren mich hierbei primär nicht. Denkst du daran die vorgeschlagene Mehrkörpersimulation in Catia durchzuführen? Wie soll es in Catia möglich sein einen Parameter wie eine Kraft zu steuern? Thanks a lot und Grüße
Markus Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
michel01
Mitglied
Beiträge: 62
Registriert: 14.11.2001
|
 erstellt am: 02. Mai. 2007 14:37 <-- editieren / zitieren --> Unities abgeben: Nur für Markao
erstellt am: 02. Mai. 2007 14:37 <-- editieren / zitieren --> Unities abgeben: Nur für Markao
Zitat:
Original erstellt von Markao:
Hallo Dominique,mein Ziel ist es einen Bauteiltransfer zu simulieren um eine dynamische Kollisionsprüfung zwischen Bauteil und umliegender Mechanik durchführen zu können. Kräfte interessieren mich hierbei primär nicht. Denkst du daran die vorgeschlagene Mehrkörpersimulation in Catia durchzuführen? Wie soll es in Catia möglich sein einen Parameter wie eine Kraft zu steuern? Thanks a lot und Grüße
Markus
Hallo zusammen, ich denke ihr seid da ein wenig auf dem falschen Weg  . Um eine derartige Aufgabe zu erledigen sind die DELMIA Tools die erste Wahl, genauer gesagt die DELMIA V5 Robotics Workbenches. Mit den darin enthaltenen Funktionen und Tools lässt sich ein solche einfacher Transfer samt Kollisionuntersuchung sehr einfach abbilden. . Um eine derartige Aufgabe zu erledigen sind die DELMIA Tools die erste Wahl, genauer gesagt die DELMIA V5 Robotics Workbenches. Mit den darin enthaltenen Funktionen und Tools lässt sich ein solche einfacher Transfer samt Kollisionuntersuchung sehr einfach abbilden. Gruß
michel01 Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
HolländerD
Mitglied
Dipl. Ing.
Beiträge: 28
Registriert: 24.05.2005
|
erstellt am: 03. Mai. 2007 11:04 <-- editieren / zitieren --> Unities abgeben: Nur für Markao
Markus, vermutlich ist für Deine Aufgabenstellung eine Lösung mit dem von Michel01 angesprochenen Tool möglich. Für eine Mehrkörpersimulation bräuchtest Du eine Art CATIA Add on (Dassault bietet dazu keine eigene Lösung). Damit wäre es dann wie gesagt auch möglich die tatsächlichen Masseneffekte zu berücksichtigen. Ich könnte mir vorstellen, daß es beim Anfahren verschiedener Positionen zu einer Art von ungewollten Überschwingen des Robotors (bedingt durch Trägheiten) kommen kann. Diese sind durch eine rein kinematische Simulation nicht abbildbar. Oder auch Bestimmungen der Lagerbelastungen des Robotors, Berücksichtigung von Lagersteifigkeiten oder minimal nötige Haltekräfte etc. sind nicht möglich. Geschweige denn Bestimmung der Kontaktkräfte...
Aber diese Themen sind ja in Deiner Fragestellung nicht relevant.
Etwas verwirrend für mich ist Deine Bezeichnung "dynamische Kollisionsprüfung", da ich die Berücksichtigung der Dynamik in diesem Zusammenhang nicht sehe. Gruß und viel Erfolg
Dominique ------------------
LMS Deutschland GmbH
Dominique.Hollaender@lms-GmbH.de
<http://www.lmsintl.com>
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
fireman
Mitglied
Dipl.-Ing. (BA) Maschinenbau
Beiträge: 736
Registriert: 22.11.2002
|
 erstellt am: 04. Mai. 2007 06:13 <-- editieren / zitieren --> Unities abgeben: Nur für Markao
erstellt am: 04. Mai. 2007 06:13 <-- editieren / zitieren --> Unities abgeben: Nur für Markao
im konkreten Fall: statische Kollisionsprüfung = Kollisionsprüfung in der KO-Umgebung, ohne Bewegung der Bauteile (clash-Untersuchung) dynamische Kollisionsprügung = Kollisionsprüfung mit bewegten Bauteilen (also Bewegung durch DMU-Kinematics) Deine Aspekte (Dominique) finde ich sehr interessant und spannend, geht aber über die angestrebte Aufgabenstellung um ein weites drüber hinaus (aber danke für den Einblick und Deine Anregungen, sind echt gut!). Gruß aus dem wilden Süden, fireman ------------------
Be yourself, but better! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Markao
Mitglied
Ingenieur / Konstruktion
Beiträge: 11
Registriert: 13.02.2007
|
erstellt am: 05. Mai. 2007 11:01 <-- editieren / zitieren --> Unities abgeben:
Vielen Dank alle zusammen für die interessanten und guten Beiträge! In der Tat versuche ich die oben beschriebenen Ziele allein mit den in CatiaV5/DMU-Kinematiks + Space Analysis enthaltenen Möglichkeiten zu erreichen. Viele Grüße Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
michel01
Mitglied
Beiträge: 62
Registriert: 14.11.2001
|
erstellt am: 12. Jun. 2007 17:43 <-- editieren / zitieren --> Unities abgeben: Nur für Markao
Hallo nochmal! Im Anhang ein kleines Beispiel, damit wir auch alle wissen, wovon Markao spricht. Aufwand um sowas abzubilden: keine 2 Minuten. Vorausgesetzt natürlich, dass alle Geometrien vorhanden sind, die gewünschten Bewegungsparameter bekannt sind etc. und man weiss wie es geht  michel01 PS: Die Qualität des GIF ist leider nicht so gut, avi lässt sich aber nicht hochladen....
[Diese Nachricht wurde von michel01 am 12. Jun. 2007 editiert.]
[Diese Nachricht wurde von michel01 am 12. Jun. 2007 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
RoyDraxler
Mitglied
Programmierer
Beiträge: 4
Registriert: 08.07.2013
|
erstellt am: 17. Jul. 2014 08:50 <-- editieren / zitieren --> Unities abgeben: Nur für Markao
Hallo michel01 ich habe auch vor kurzem angefangen mit Delmia zu arbeiten und möchte nun auch eine solche Aktion durchführen.
In meinem Fall soll der Roboter eine Türe öffnen.
Wie gehe ich da im Detail vor? Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de
Foren auf CAD.de



 |
|