| | |
 | CATIA V5 Grundkurs | Einsteiger - 5 Std. 15 Min 48 |
| | |
 | KISTERS 3DViewStation: verbesserte Effizienz durch optimierte Bedienoberfläche, eine Pressemitteilung
|
|
Autor
|
Thema: Problem beim ausführen der Kinematic simulation (1967 mal gelesen)
|
Shockwave
Mitglied
Dipl. Ing Konstrukteur Kranbau

   Beiträge: 54
Registriert: 26.04.2005 Dell M70
1,86GHz Pentium M 2MB
2GB Ram
Nividia Quadro FX 1400 256MB
Display 1920x1200
160GB Festplatte
|

 erstellt am: 06. Okt. 2006 17:40
erstellt am: 06. Okt. 2006 17:40  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Hallo !!! Ich bräuchte mal eure Hilfe!!!!!! Ich habe den Roboter und einen Greifer in DMU Kinematic erstellt. Soweit funktioniert auch alles, Ich kann alles simulieren. ( per Hand mit den Schiebereglern) Sobald ich aber die aufgezeichneten Wege mit der Wiedergabe abspielen will kackt Catia ab, es läuft ca. 5sec. und dann ist ruhe und Catia steht. Noch was zu meiner Technik: Dell Precision M 70
1,86Ghz, Centrino 2MB,
2GB Ram
Quadro FX 1400 256MB
Catia V5 R 16 ohne Servicepack könnte es einfach nur an meinem Rechner liegen das es nicht weiter geht, oder hat es andere Gründe. Die CPU Last geht wärend des ganzen Vorgangs nicht unter 100%. Sollte ich mit einfach einen schnelleren Rechner mit z.B. Dual Core suchen und es dort nochmal Probieren oder gibt es noch andere Möglichkeiten. Über eine Hilfe wäre ich sehr Dankbar. PS: Vieleicht habt ihr auch noch ein Paar Tips wie ich es in Zukunft besser machen könnte, oder ob mein Weg schon so hinhaut.
Dies ist meine bisher größte Simulation die ich gemacht habe. Tschüß Christian Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
amigician
Mitglied
Berechnungsingenieur
Beiträge: 176
Registriert: 18.06.2004 P4 3Ghz 1GB RAM
WinXP SP2
CATIA R15SP5 & R16SP6
(Ansys, IcemCFD, CFX) 10.0
|
erstellt am: 11. Okt. 2006 10:54 <-- editieren / zitieren --> Unities abgeben: Nur für Shockwave 
Hallo Christian Sehr interessant. Bin gerade in einem ähnlichen Gebiet unterwegs. Überlege mir die Inverse Kinematik über ein externes Programm zu berechnen und per Makro ins Kinematics reinzuschreiben. Zu deinem Beispiel: Stell es doch mal als zip hier rein, dann kann ich's mal ausprobieren, ob es bei mir das System auch blockiert. N.B: Ich teste gerade Delmia V5 Robotics. Fazit: langsam und fehlerhaft (Kann ich bei Bedarf mit Beispielen hinterlegen). Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Shockwave
Mitglied
Dipl. Ing Konstrukteur Kranbau
Beiträge: 54
Registriert: 26.04.2005 Dell M70
1,86GHz Pentium M 2MB
2GB Ram
Nividia Quadro FX 1400 256MB
Display 1920x1200
160GB Festplatte
|
erstellt am: 11. Okt. 2006 19:13 <-- editieren / zitieren --> Unities abgeben:
Hallo!!! Danke für die Antwort, ich kann aber die Datein nicht reinstellen, da hätte die Firma was dagegen, Mir ist noch eine Idee gekommen wie es eventuell gehen könnte. Ich werde alle Datein in STEP Datein umwandeln und dann nochmal die Simulation probieren. Ich habe bis jetzt immer die Parts reinkopiert nur da waren meine Baugruppen nicht so groß. Vieleicht macht man es normalerweise auch so, ich weis es leider nicht besser über eine Anmerkung wäre ich dankbar. Wir haben die Simularion heute nochmal auf einem Intel Dual Core 3,6Ghz probiert und es ging auch nicht besser. >>>> es kann also nicht an meinem kleinem Dell liegen. Ich werde das mit den STEP Datein noch probieren, und hoffen das es geht. Ich werde dann das ergebnis bekanntgeben. Tschüß Christian Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Shockwave
Mitglied
Dipl. Ing Konstrukteur Kranbau
Beiträge: 54
Registriert: 26.04.2005 Dell M70
1,86GHz Pentium M 2MB
2GB Ram
Nividia Quadro FX 1400 256MB
Display 1920x1200
160GB Festplatte
|
erstellt am: 11. Okt. 2006 22:45 <-- editieren / zitieren --> Unities abgeben:
Hallo nochmal!!! Das mit den STEP Datein war keine super Idee, es sind ja schon alle anhänge reduziert, das hat also nix gebracht, Ich muss noch sagen das es 272 Teile sind die ich in meinem Produkt habe, IST DAS ZU VIEL FÜR CATIA???????????????? Wenn einer noch eine Idee hat, bitte helft mir!!!!!!!!! Ich habe beim erstellen des Produkts einfach die Daten reinkopiert zusammengestellt und mit bedingungen versehen. Das sollte doch richtig sein, An was kann es nur noch liegen. Habe auch das Buch, Bewegungssimulation vom Hanser Verlag aber da steht auch nix drinn.
Bitte helft mir!!!!!!!!!
Tschüß Christian Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
amigician
Mitglied
Berechnungsingenieur
Beiträge: 176
Registriert: 18.06.2004 P4 3Ghz 1GB RAM
WinXP SP2
CATIA R15SP5 & R16SP6
(Ansys, IcemCFD, CFX) 10.0
|
erstellt am: 12. Okt. 2006 12:11 <-- editieren / zitieren --> Unities abgeben: Nur für Shockwave
Hallo Christian Hab's jetzt grad mit einem Roboter mit nur 7 Parts probiert. Zuerst gings. Dann habe ich das ganze noch mal frisch geöffnet. Bleibt auch mit Sanduhr und 100% CPU-Last hängen. Keine Ahnung wieso. Gruss
Lorenz Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
catz
Mitglied
Beiträge: 733
Registriert: 26.02.2003 V4
V5
VPM
AIX
|
erstellt am: 12. Okt. 2006 13:13 <-- editieren / zitieren --> Unities abgeben: Nur für Shockwave
Hi, ich vermut Ihr 2 habt deutlich mehr erfahrung mit V5 KIN. Aber solche Beobachtungen hab ich noch nicht gemacht. Frage: Liegen die 272 Parts alle untereinander in der ersten Ebene des Produktes? Und bewegen sich alle irgendwie zueinander? Ich machs immer so: Ich erstelle (meine quck&dirty lösung) verschiedene Komponenten in derster Ebene des Catprodukts und benenne diese entsprechend ihrer Funktion: Fix, Arm1, Arm2, ..... .
Dann sortiere ich die CATParts in diese Komponenten ein. Dann erstelle ich in jeder Komponente falls Notwendig ein CATPart mit der Wireframegeometrie die ich für Bedingungen brauche. So hat das bisher auch bei vielen Teilen gut funktioniert. Aber mehr als 5 sich zueinander bewegende Baugruppen hatte ich noch nicht. ....evt. hilfs
Gruß
Stefan Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
amigician
Mitglied
Berechnungsingenieur
Beiträge: 176
Registriert: 18.06.2004 P4 3Ghz 1GB RAM
WinXP SP2
CATIA R15SP5 & R16SP6
(Ansys, IcemCFD, CFX) 10.0
|
erstellt am: 12. Okt. 2006 14:11 <-- editieren / zitieren --> Unities abgeben: Nur für Shockwave
|
Shockwave
Mitglied
Dipl. Ing Konstrukteur Kranbau
Beiträge: 54
Registriert: 26.04.2005 Dell M70
1,86GHz Pentium M 2MB
2GB Ram
Nividia Quadro FX 1400 256MB
Display 1920x1200
160GB Festplatte
|
erstellt am: 13. Okt. 2006 00:23 <-- editieren / zitieren --> Unities abgeben:
Hallo Danke für die Datein, bei mir läuft der Robi den du mir geschickt hast auch ohne Probleme, nur wie gesagt es sind nur 7 Teile und nicht 280. Mein ABB Robi läuft ohne den Greifer bei mir auch ohne Probleme. Ich habe heute noch eine Anregung von einem sehr netten Angestellten der Firma CAD SCHEFFLER bekommen. Hier sein TIPP Ich würde Ihnen empfehlen, die Kinematik nicht im realen Modell einzubinden. Die Verwaltung der Bedingungen ist auch so schon komplex genug.
Ich schlage folgende vorgehensweise vor: - Die Kinematik über einfache Drahtgeometrieen (Parts mit Linien, Punkten usw.) aufbauen und simulieren.
- Im DMU mit dem Chache System arbeiten, dann werden in der Sitzung cgr- Daten geladen ( sind ca. um den Fakto 10 kleiner von der Datenmenge)
- Mit der Funktion MechanismDressup (deutsch: Mechanismusaufbereitung) die 3D Geometrie an die Kinematik anhängen. Das klingt schon sehr gut, nur sowas habe ich noch nie gemacht und bis jetzt weis ich noch nicht wie ich das realisieren soll. Wenn mir da jemand noch helfen könnte wäre ich super dankbar. Tschüß Christian Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Catrin
Ehrenmitglied
Ingenieurin Maschinenbau/Informatik
Beiträge: 1929
Registriert: 12.12.2000
|
erstellt am: 13. Okt. 2006 08:44 <-- editieren / zitieren --> Unities abgeben: Nur für Shockwave
Eigentlich ist das doch in dem Schreiben von CAD Scheffler eindeutig gesagt worden: Geometrie im Part erzeugen, die fuer die Kinematik notwendig ist.
Das heisst, fuer eine Point-Point-Verbindung z.B. Punkt in einem Part - anderen Punkt im anderen Part, fuer eine Revolute-Verbindung in dem einen Part Achse und Ebene in dem anderen ebenso. /Natuerlich muessen die Elemente genau an der Stelle liegen, wo sie auch in den auskonstruierten teilen liegen !!!!)
Die erzeugte Basis-Geometrie nutzen, um den kinematischen Mechansimus zu definieren.
Mechanismus zum testen laufen lassen und schauen, ob sich die "Draehte" alle bewegen.
Mit dem Icon Dressup (das sieht aus wie ein Zahnrad, ueber das eine Jacke druebergehaengt wird) jetzt den Parts mit der Drahtgeometrie die realen Bauteile zuweisen. Wie das geht, steht in der Online-Hilfe sehr gut beschrieben drin.
Keine Zauberei, alles logisch 
Gruss
Catrin
------------------
CATIS GmbH 38440 Wolfsburg
catrin.eger@catis.de www.catis.de
 Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Shockwave
Mitglied
Dipl. Ing Konstrukteur Kranbau
Beiträge: 54
Registriert: 26.04.2005 Dell M70
1,86GHz Pentium M 2MB
2GB Ram
Nividia Quadro FX 1400 256MB
Display 1920x1200
160GB Festplatte
|
erstellt am: 13. Okt. 2006 11:13 <-- editieren / zitieren --> Unities abgeben:
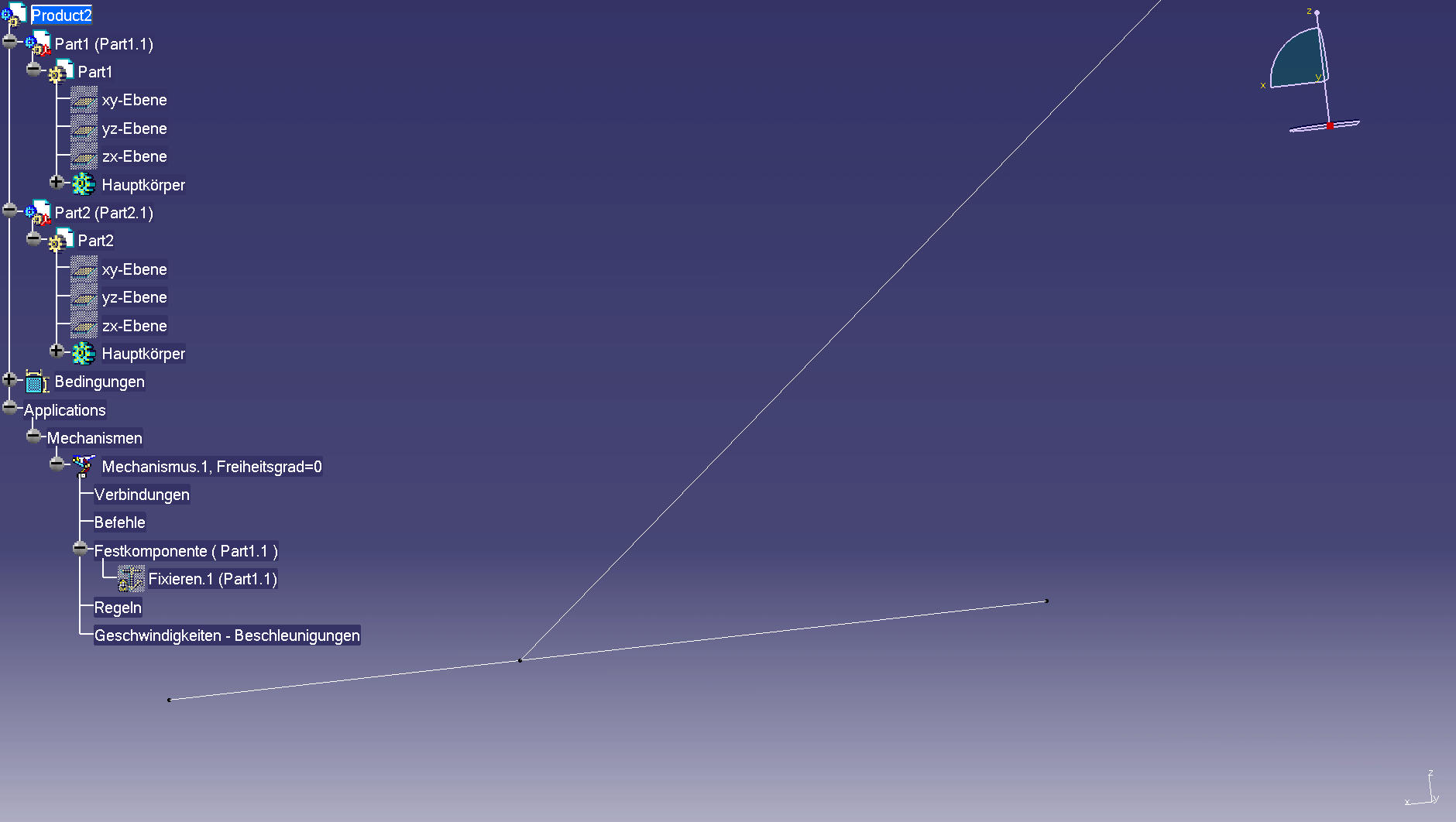
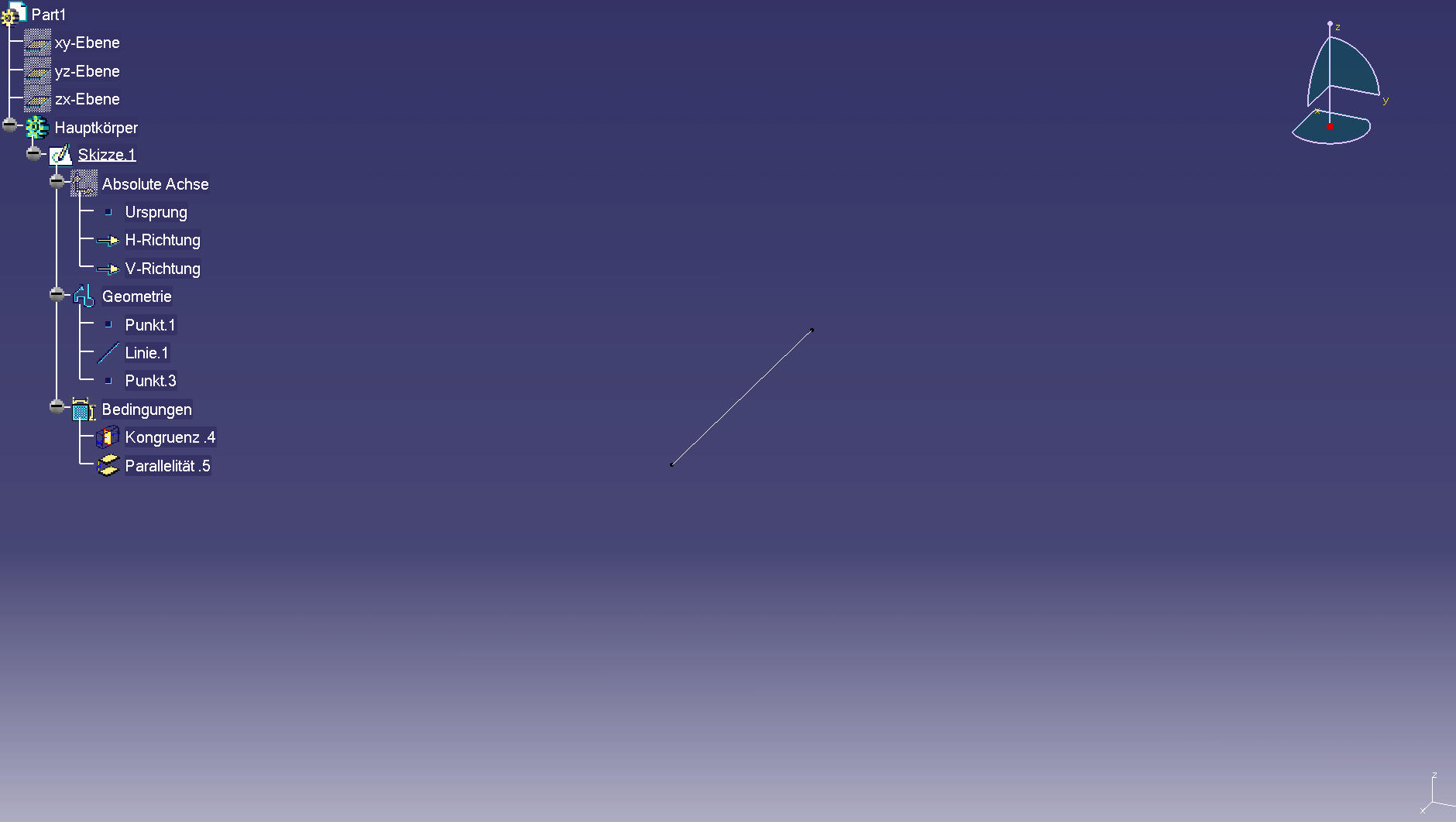
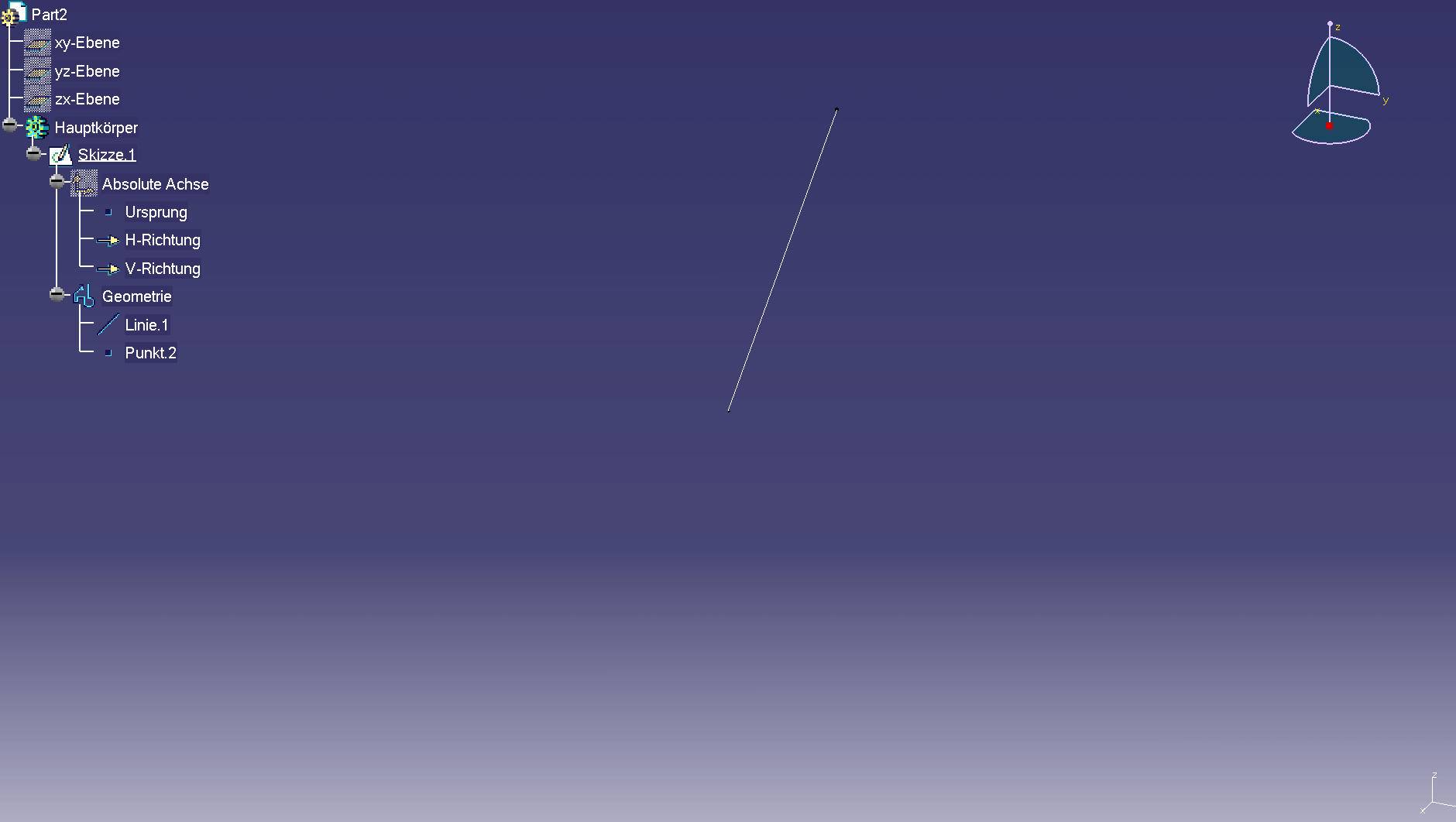
Hallo Catrin Ich muss doch noch mal was fragen, ich sitze den ganzen morgen schon dran die mechanismen im Part zu machen, aber ich komme einfach nicht so richtig weiter. Wenn ich deine Beschreibung richtig deute muss ich folgender weise vorgehen. Part Design > Skizze > ein Drahtgestell erstellen von meinen Robi > dann die einzelnen linien in Kinematics einfügen > jetzt mit Bedingungen versehen (( Problem )) ( wie vergebe ich drehbedingungen um die Achsen ich kann da immer nur 3 von 4 elementen auswählen. ((Bild)) Nächstes Probelm!!! Wenn du dir das Bild anguckst was ich ganz oben in meinem Beitrag angehängt habe siehst du das im Prinzip nicht der Robi mein Problem ist sondern nur der Greifer der vorne dran ist. Dieser besteht aus 250 Teilen ( Schrauben, Profilen, Festo Teilen) den kann ich doch ünmöglich alles mit punkt zu punkt verbindungen Darstellen oder!!!! Oder muss ich das doch!!!!!!!!!!  Das ist bis jetzt meine umfangreichste Simulation die ich gemacht habe, und meine Kin erfahrung beruhen hauptsächlich auf Bücheren vom Hanser Verlag und das was ich mir selbst bei bringe. Es gibt leider keinen bei uns an der FH der sowas schonmal gemacht hat. Traurig aber wahr. Deshalb, wenn du zeit hast würde ich mich über ein paar konstruktive Tips deinerseits freuen, und danke dir schon mal im vorraus. Ich füge mal noch ein Paar versuchsbilder an !!!! Tschüß Christian Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Catrin
Ehrenmitglied
Ingenieurin Maschinenbau/Informatik
Beiträge: 1929
Registriert: 12.12.2000
|
erstellt am: 13. Okt. 2006 11:44 <-- editieren / zitieren --> Unities abgeben: Nur für Shockwave
Sorry, ich glaub, Du hast die Kinematik nicht verstanden. Dann kannst Du auch zu keiner Loesung kommen. Und eigentlich hilft dir nur eine Schulung.... Trotzdem kurz ein paar wesentlich regeln:
1. Constraints in Skizzen haben KEINE Auswirkung auf Kinematik
2. Assembly-Constraints nur zum Positionieren der teile benutzen, nicht zum Simulieren.
3. Elemente koennen sich nur gegeneinander bewegen, wenn sie in unterschiedlichen Teilen sind. Sollen sich Teile gleich bewegen (in grosser Anzahl), empfiehlt sich folgende Vorgehensweise:
1. Die Punkite/Linien/Ebenen in einem Part erzeugen, die fuer die Bewegung der ganzen Einheit notwendig sind.
2. Dieses part in die Kinematik einbinden.
3. Alle Elemente, die zur Einheit gehoeren, in einem Sub-Assembly zusammenfassen
3. Das Sub-Assembly durch Dressup an das Part mit den Punkten/Linien/Ebenen anhaengen. Welche fachhochschule besuchst Du ?
Gruss
Catrin
------------------
CATIS GmbH 38440 Wolfsburg
catrin.eger@catis.de www.catis.de
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Shockwave
Mitglied
Dipl. Ing Konstrukteur Kranbau
Beiträge: 54
Registriert: 26.04.2005 Dell M70
1,86GHz Pentium M 2MB
2GB Ram
Nividia Quadro FX 1400 256MB
Display 1920x1200
160GB Festplatte
|
erstellt am: 13. Okt. 2006 11:54 <-- editieren / zitieren --> Unities abgeben:
Hallo!!! Du hast recht, das ich Kinematik nicht ganz verstehe (zumindest wenn es um die einbettung in Catia geht) Nur wie gesagt ich habe mir alles selber beigebrauch, und woher soll ich es den dann besser Wissen. Den Namen sage ich dir hier nicht öffentlich, das wirft wieder ein unschönes Bild. Du hast recht das ein Lehrgang helfen würde, ich habe ja mal bei deiner Firma geguckt nur 380€ habe ich als Student nicht so ohne weiteres übrig, oder gits bei euch Studentenrabatt?????  Trotzdem danke für deine Antwort,
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Catrin
Ehrenmitglied
Ingenieurin Maschinenbau/Informatik
Beiträge: 1929
Registriert: 12.12.2000
|
erstellt am: 16. Okt. 2006 11:14 <-- editieren / zitieren --> Unities abgeben: Nur für Shockwave
|
Shockwave
Mitglied
Dipl. Ing Konstrukteur Kranbau
Beiträge: 54
Registriert: 26.04.2005 Dell M70
1,86GHz Pentium M 2MB
2GB Ram
Nividia Quadro FX 1400 256MB
Display 1920x1200
160GB Festplatte
|
erstellt am: 16. Okt. 2006 21:04 <-- editieren / zitieren --> Unities abgeben:
|

 Foren auf CAD.de
Foren auf CAD.de



 |
|