| | |
 | CATIA V5 Grundkurs | Einsteiger - 5 Std. 15 Min 48 |
| | |
 | Tipps für effizienteres Arbeiten mit 3D-CAD-Visualisierungssoftware, eine Pressemitteilung
|
|
Autor
|
Thema: Frage zu Kinematik - Wer kann helfen? (5428 mal gelesen)
|
Roebert
Mitglied

   Beiträge: 23
Registriert: 20.08.2006
|

 erstellt am: 20. Aug. 2006 08:35
erstellt am: 20. Aug. 2006 08:35  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Hallo! Ich bin neu hier und habe gleich mal eine Frage zur Kinematik in V5. Ich habe ein fixes Part 1. Nun habe ich noch ein Part 2 das sich über einen "Cylindrical Join" zu dem Fix Part 1 drehen und verschieben lässt. Ein weiteres Part 3 existiert. Nun möchte ich gerne dass sich das Part 3 mit dem Part 2 verschieben lässt. Aber nur dann wenn dass Part 2 in einem bestimmten Winkel (relativ zum fixen Part 1, z.B. 30 Grad) gedreht ist. Wenn Part 2 weitergedreht (also nicht Winkel 30 Grad) ist und dann verschoben wird soll Part 3 nicht mit verschoben werden.
Ist das irgendwie verständlich?
Wer kann helfen?
Vielen Dank im voraus.
Gruss
Robert
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Ex-Mitglied

|
erstellt am: 20. Aug. 2006 09:38 <-- editieren / zitieren -->
Hallo Roebert, könntest du ein Bild hochladen? Dann wird es etwas verständlicher. Bei dem, was ich im Augenblick glaube zu verstehen, wirst du wohl die Simulation mit Regeln ablaufen lassen müssen. Das heißt, zwei Antriebe ("Befehle") und zwei Regeln, die über die Zeit miteinander verknüpft sind. Viele Grüße, CEROG ------------------
 Inoffizielle Linux-Hilfeseite Inoffizielle Linux-Hilfeseite
http://www.cad-gaenssler.de |
Roebert
Mitglied
Beiträge: 23
Registriert: 20.08.2006
|
erstellt am: 20. Aug. 2006 14:38 <-- editieren / zitieren --> Unities abgeben:
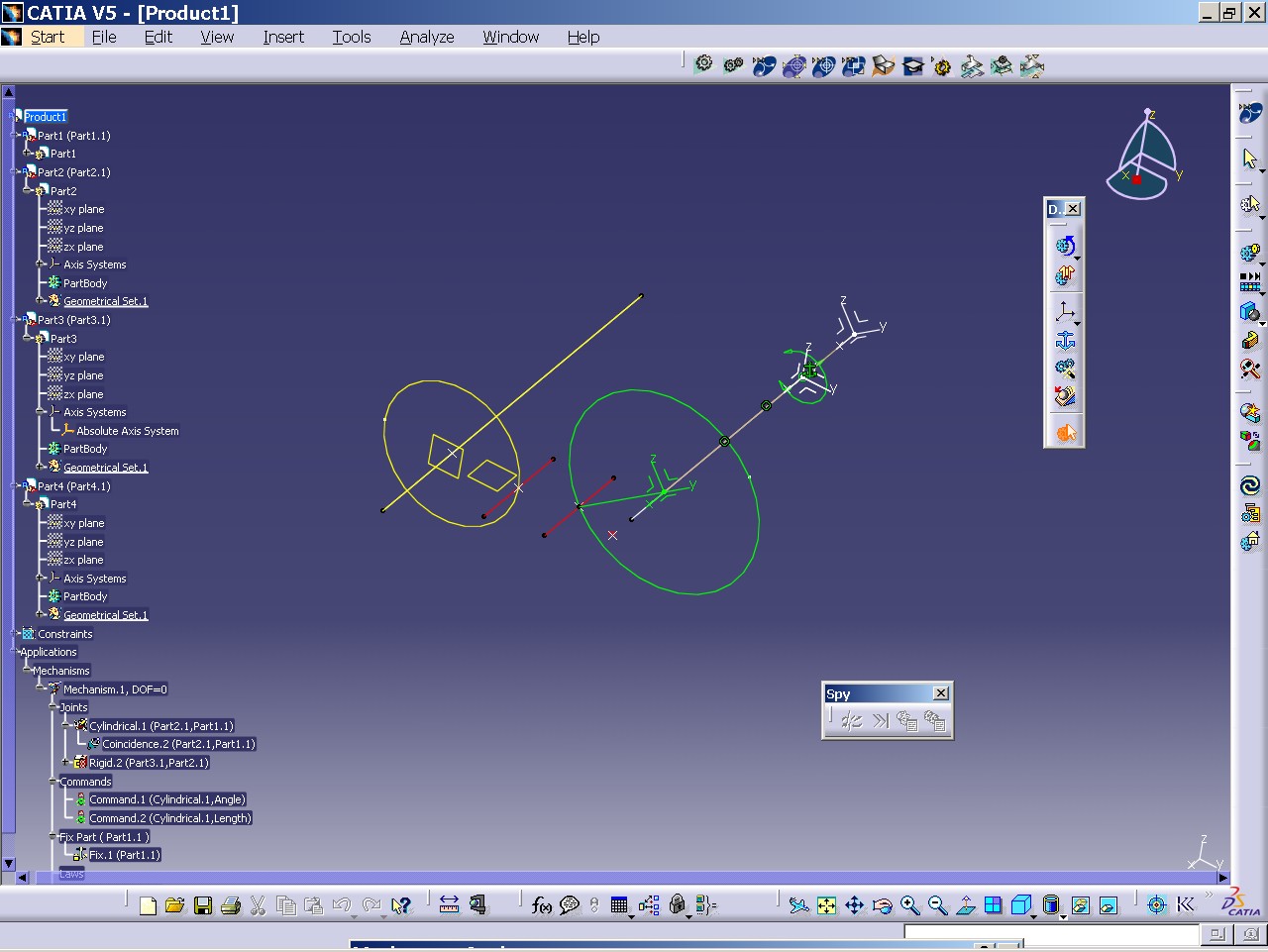
Hallo CEROG! Anbei ein Foto von meinem Problem. Das grüne Part 3 kann sich durch den Cylindrical Join mit Part 2 (braun) drehen und verschieben. Part 1 ist fix und mit einem Rigid Join mit Part 2 verbunden. Das gelbe Part 4 soll sich nun mit dem grünen Part 4 gemeinsam nur dann verschieben (also keine Drehung) wenn die beiden roten Linien die senkrecht zu dem Kreisbogen genau aufeinanderliegen (oder wenn das grüne Part 3 einen bestimmten Drehwinkel hat) Ich hoffe es ist verständlich :-) Wie kann ich das irgendwie realisieren?
Gruss
Robert
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Ex-Mitglied
|
erstellt am: 20. Aug. 2006 17:38 <-- editieren / zitieren -->
Hallo Roebert, danke für das Bild. Du hast es geschafft:
Bis jetzt war ich der Meinung, daß eine Erklärung durch ein Bild deutlicher würde. Jetzt nicht mehr. Ich hatte gehofft, Hinweise zu finden, ob da Teile in Kulissen geführt werden und so. Das bringt deine Skizze (nicht in CATIAs Bedeutung des Wortes) leider nicht. Also versuchen wir es mal anders.
Wenn ich deine Erläuterungen richtig verstehe, soll das Getriebe folgendermaßen sein:
Part 1 ist das feste Teil, also das Gestell oder Gehäuse oder wie du es nennen willst.
Part 2 ist gegenüber Part 1 drehbar gelagert und gleichzeitig verschiebbar (Cylindrical Joint, Gelenkfreiheitsgrad 2). Die Bewegung von Part 2 ist erst eine Drehung von 30 Grad dann eine Verschiebung und dann eine weitere Drehung.
Part 3 ist gegenüber Part 1 verschiebbar gelagert (Prismatical Joint, Getriebefreiheitsgrad 1). Es soll sich mit der Verschiebung von Part 2 mitbewegen. Nach dem Ende der Verschiebung soll es stillstehen. Falls das so stimmt benötigst du die angegebenen Joints (1x Cylindrical, 1x Prismatik) und drei Antriebe ("Befehle", "Commands").
Für diese Commands brauchst du zwei stückweise definierte Kurven:
1. Kurve: Drehung von 0-30°, Stillstand, weiterdrehen
2. Kurve: Stillstand, Verschiebung, Stillstand (oder Rücklauf)
Die zweite Kurve wird mehrfach verwendet. Es sind auch zwei getrennte Kurven möglich... Die erste Kurve stellt den Drehbewegungsablauf des Parts 2 dar, die zweite den Verschiebungsablauf des Parts 2 und des Parts 3. Sie sind den entsprechenden Commands zuzuordnen. Die Simulation muß dann mit den Kurven verbunden werden. Ich hoffe, dir etwas weiterhelfen zu können. Viele Grüße, CEROG ------------------
Inoffizielle Linux-Hilfeseite
http://www.cad-gaenssler.de |
Roebert
Mitglied
Beiträge: 23
Registriert: 20.08.2006
|
erstellt am: 21. Aug. 2006 07:07 <-- editieren / zitieren --> Unities abgeben:
Hallo! Also Part 2 ist drehbar und verschiebar gegenüber Part 1 (fix) gelagert. Part 3 ist fest mit Part 2 verbunden (Rigid Join). Es lassen sich also Part 3 und Part 2 gemeinsam drehen und verschieben. Das soll einfach mal so sein. Jetzt möchte ich aber dass wenn die rote Linie vom Part 3 durch Drehung genau auf der roten Linie vom Part 4 liegt sich Part 4 und Part 3 (Part 2 natürlich auch mit) gemeinsam durch einen Prismatic Join nur verschieben lässt. Ist bestimmt nicht leicht zu verstehen. Gruss
Robert
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Ex-Mitglied
|
erstellt am: 21. Aug. 2006 19:46 <-- editieren / zitieren -->
HAllo Roebert, dann haben wir jetzt also vier Teile. Grundsätzlich ändert sich dadurch aber nichts. Mal eine angepaßte Zusammenfassung:
Part 1 ist das feste Teil, also das Gestell oder Gehäuse oder wie du es nennen willst.
Part 2 ist gegenüber Part 1 drehbar gelagert und gleichzeitig verschiebbar (Cylindrical Joint, Gelenkfreiheitsgrad 2). Die Bewegung von Part 2 ist erst eine Drehung von 30 Grad dann eine Verschiebung und dann eine weitere Drehung.
Part 3 ist fest mit Part2 verbunden und bewegt sich mit ihm.
Part 4 ist gegenüber Part 1 verschiebbar gelagert (Prismatical Joint, Getriebefreiheitsgrad 1). Es soll sich mit der Verschiebung von Part 2 und drei mitbewegen. Nach dem Ende der Verschiebung soll es stillstehen. Falls das so stimmt benötigst du die angegebenen Joints (1x Cylindrical, 1x Prismatik) und drei Antriebe ("Befehle", "Commands").
Für diese Commands brauchst du zwei stückweise definierte Kurven:
1. Kurve: Drehung von 0-30°, Stillstand, weiterdrehen
2. Kurve: Stillstand, Verschiebung, Stillstand (oder Rücklauf)
Die zweite Kurve wird mehrfach verwendet. Es sind auch zwei getrennte Kurven möglich... Die erste Kurve stellt den Drehbewegungsablauf des Parts 2 dar, die zweite den Verschiebungsablauf des Parts 2 und des Parts 4. Sie sind den entsprechenden Commands zuzuordnen. Die Simulation muß dann mit den Kurven verbunden werden. So weit sollten wir jetzt übereinstimmen. Ist es jetzt soweit verständlich, ich meine? Viele Grüße, CEROG ------------------
Inoffizielle Linux-Hilfeseite
http://www.cad-gaenssler.de |
Roebert
Mitglied
Beiträge: 23
Registriert: 20.08.2006
|
erstellt am: 22. Aug. 2006 06:37 <-- editieren / zitieren --> Unities abgeben:
Hallo! Danke für Deine Bemühungen. Ich denke Du hast das Prinzip das ich will verstanden. Nur möchte ich nicht eine aufeinanderfolgende ablaufende Bewegung, die 30 Grad war nur ein Beispiel. Ich möchte Part 2 mit Part 3 halt beliebig verschieben und verdrehen können (funktioniert ja auch einwandfrei mit Cylindrical Join) Aber erst wenn die roten Linien von Part 3 und von Part 4 genau aufeinanderliegen z.B eben bei 30 Grad Verdehung von Part 2 und Part3, erst dann möchte ich dass es durch einen weiteren Join sich alle 3 Parts nur noch verschieben lassen. Ist die Verschiebung wieder an dieser Stelle 0 dann möchte ich geren wieder Part 2 und 3 "wegdrehen" können. Ich will sozusagen bei einem bestimmten Drehwinkel ein fremdes Part was nicht zu meinen Cylindricla Join gehört verschieben können. Ich habe das schon mal in einer Kinematik versucht, aber irgendwie kommt immer eine fehlermeldung auch lässt sich das irgendwie nicht mit den erzeugten Constrains vereinbaren.
Ich hoffe ich belästige Dich nicht zu sehr.
Gruss
Robert
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Ex-Mitglied
|
erstellt am: 22. Aug. 2006 07:49 <-- editieren / zitieren -->
Hallo Roebert, so wie ich das sehe, wirst du tricksen müssen, wenn die Lage der roten Linien beliebige sein soll. Will heißen, du brauchst die Lösung auf grund der Simulation mit Regeln. Dazu mußt du dann aber immer den Drehwinkel bis mzu den Linien wissen. Das könnte man mit zwei Ebenen machen, zwischen denen man den Winkel mißt. Oder du gibst den Winkel jeweils explizit vor. Möglicherweise ist es dann besser, die Regeln nicht grafisch, sondern über Werte zu definieren.Dann lassen sich die Regeln wohl schneller ändern. Welche fehlermeldungen bekommst du, wenn du es mit einer Kinematik versuchst? Vielleicht können wir die ja weiterhelfen. Viele Grüße, CEROG ------------------
Inoffizielle Linux-Hilfeseite
http://www.cad-gaenssler.de |
Catrin
Ehrenmitglied
Ingenieurin Maschinenbau/Informatik
Beiträge: 1929
Registriert: 12.12.2000
|
erstellt am: 22. Aug. 2006 08:40 <-- editieren / zitieren --> Unities abgeben: Nur für Roebert 
Jetzt gebe ich auch mal meinen Senf dazu  Solche Sachen sind meines Wissens im Moment nur zu machen, wenn man zwei Mechanismen definiert. Da Dassault nicht vorgesehen hat, Bewegungen Lageabhaengig gegeneinenander steuern zu koennen, muss man das mit Gesetzen machen oder/und mit mehreren Mechansismen, die in der Simulation gemeinsam angeschoben werden. Was heisst das in Deinem Fall:
1. Du brauchst einen Mechansismus fuer die "allgemeine" Bewegung, die das Drehen und Schieben beinhaltet.
2. Du brauchst einen Mechanismus, der nur das Schieben beinhaltet.
3. Du musst eine Simulation erzeugen, die Deine Bewegungsablaeufe wiedergibt:
Step 1: Drehen (mechansimus 1)
Step 2: Schieben (mechanismus 1)
Step 3: Drehen (Mechanismus 1)
Step 4: Schieben (Mechanismus 2)
usw.... Fuer Simulationen macht man sich im Normalfall ein Scenario, damit der Aufbau auch funktioniert. Ich hoffe, das war jetzt verstaednlich.
Gruss
Catrin ------------------
CATIS GmbH 38444 Wolfsburg
catrin.eger@catis.de www.catis.de
 Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Roebert
Mitglied
Beiträge: 23
Registriert: 20.08.2006
|
erstellt am: 23. Aug. 2006 06:25 <-- editieren / zitieren --> Unities abgeben:
Hallo! Danke für Eure Bemühungen. Aber kann man nicht dieses Problem irgendwie mit "Rules", also mit vorher vereinbarten Gesetzen lösen? Es müsste doch gehen wenn man vereinbart dass bei einem bestimmten Drehwinkel von Mechanismus 1 ( Cylindrical Join) ein Mechanismus 2 aktiviert wird (Prismatic Join), oder?
Gruss
Robert
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Ex-Mitglied
|
erstellt am: 23. Aug. 2006 07:22 <-- editieren / zitieren -->
Hallo Roebert, mit dem Prismatical Joint meinst du vermutlich den von Part 4. Über die Regeln für die Simulation werden die Bewegungen im Zeitverlauf gesteuert. DEshalb brauchst du ja für die 3 Antriebe (Rotation Part2, Translation Part 2 und Translation Part 4) drei Regeln. Diese Regeln werden grafisch durch Kurven oder durch direkte Eingabe von Werten definiert. Dabei kann die Bewegung auch 0 sein (entsprechend einer Steigung 0 in dem jeweiligen Kurvenstück. Um es so auszudrücken: du definierst über die Kurven den Bewegungsablauf einzelner Teile und CATIA verknüpft die einzelnen unabhängigen Bewegungen durch einen Parameter "Zeit" so miteinander, daß es aussieht, als würden die Bewegungen zusammengehören. Ich habe gerade das Gefühl, du mußt versuchen eine Kinematik aufzubauen, ohne daß dir jemand die notwendigen Grundlagen beigebracht hat. Und bist dabei an eine etwas kompliziertere Kinematik geraten. Ich habe im Augenblick keine Idee, wie ich es dir besser erklären sollte. Leider Viele Grüße, CEROG ------------------
Inoffizielle Linux-Hilfeseite
http://www.cad-gaenssler.de |
Roebert
Mitglied
Beiträge: 23
Registriert: 20.08.2006
|
erstellt am: 23. Aug. 2006 07:36 <-- editieren / zitieren --> Unities abgeben:
Hallo! Danke für die schnelle Antwort. Ich habe bis jetzt nur Kinematiken aufgebaut die, sage ich mal, zusammenhängend sind (z.B. Schaltgestänge). Dort sind ja alle Parts ständig in Verbindung durch die verschiedenen Joins. Aber bei diesem Problem hier soll ja erst ein Join sozusagen entstehen wenn man eine bestimmte Bewegung gemacht wurde(bzw. wenn ein bstimmter Wert erreicht ist).
Gruss
Robert
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Ex-Mitglied
|
erstellt am: 23. Aug. 2006 09:38 <-- editieren / zitieren -->
Hallo Roebert, das sollte kein Vorwurf an dich sein. Vielleicht hab ich mich ja bis jetzt auch falsch ausgedrückt. Stell dir die Kurven für die Antriebe als Bewegungs-Zeit-Diagramm vor. Du hast eine Referenz, die die "Zeit" darstellt. Der Wert, den die Kurve zurückliefert, ist quasi der Betrag, um den sich das jeweilige Teil bewegt hat. Mehr steckt da eigentlich nicht mehr dahinter. Viele Grüße, CEROG ------------------
Inoffizielle Linux-Hilfeseite
http://www.cad-gaenssler.de |
Roebert
Mitglied
Beiträge: 23
Registriert: 20.08.2006
|
erstellt am: 26. Aug. 2006 12:07 <-- editieren / zitieren --> Unities abgeben:
Hallo! Aber wie kann ich vereinbaren dass nur bei einem bestimmten Drehwinkel des Mechanismus 1 einen weiteres Part 4 "dazukommt" und dann bei Einhaltung dieses bestimmten Drehwinkels nur verschiebbar (Translation) ist? Kann man so eine Regel irgendwie festlegen? Mit Kurven in eienm Diagramm? Gruss
Robert
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Ex-Mitglied
|
erstellt am: 26. Aug. 2006 13:36 <-- editieren / zitieren -->
Hallo Roebert, langsam kommen wir ans Ziel. Es gibt hier letzlich zwei Möglichkeiten, wie ich weiter oben schon erwähnt habe: Die Definition des Bewegungsgesetzes über Werte uund die Definition über Kurven. Das einfachste ist, du zeichnest dir die Diagramme erstmal auf einem Blatt Papier auf. Dann hast du schneller den Überblick, welche Werte du brauchst. In diesem Zusammenhang möchte ich dich auch auf die Online-Dokumenstion hinweisen, in der die Definition von Regeln genauer erläutert ist. Viele Grüße, CEROG
------------------
Inoffizielle Linux-Hilfeseite
http://www.cad-gaenssler.de |
Roebert
Mitglied
Beiträge: 23
Registriert: 20.08.2006
|
erstellt am: 27. Aug. 2006 05:35 <-- editieren / zitieren --> Unities abgeben:
Hallo! Na ja, aber in einem Diagramm kann ich nur eine Bewegung gegenüber zweier Parts beschreiben. Ich denke z.B. ein Drehwinkel/Zeit-Diagramm zwischen Part 3 und dem fixen Part 1 oder ein Weg/Zeit-Diagramm zwischen Part 3 und dem fixen Part 1 und ein Weg/Zeit-Diagramm zwischen Part 4 und dem Part 3. Aber Du meinst wahrscheinlich ich brauche den genauen Ablauf meiner gewünschten Bewegung mit Werten. Das habe ich ja. Aber wie vereinbare ich das jetzt? Ich habe ja 2 unabhängigige Kinematiken (1 x Cylindricle Join von Part 3, Part2 mit Part1) und Prismatic Join Part 4 mit Part1) Robert Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Ex-Mitglied
|
erstellt am: 27. Aug. 2006 11:14 <-- editieren / zitieren -->
Hallo Roebert, dann werden wir jetzt wohl über das hinausgehen müssen, was ein Forum bringt. Zitat:
Original erstellt von Roebert:
Na ja, aber in einem Diagramm kann ich nur eine Bewegung gegenüber zweier Parts beschreiben. Ich denke z.B. ein Drehwinkel/Zeit-Diagramm zwischen Part 3 und dem fixen Part 1 oder ein Weg/Zeit-Diagramm zwischen Part 3 und dem fixen Part 1 und ein Weg/Zeit-Diagramm zwischen Part 4 und dem Part 3.Aber Du meinst wahrscheinlich ich brauche den genauen Ablauf meiner gewünschten Bewegung mit Werten.
[/QOUTE]
Ich meine ein Diagramm, daß die jeweiligen Bewegungen darstellt. Also ein Diagramm für die Drehung von Part 2, ein Diagramm für die Verschiebung von Part 2 und ein Diagramm für die Verschiebung von Part 4. Sie sollen dir ja nur als Hilfe dienen. [QUOTE]
Ich habe ja 2 unabhängigige Kinematiken (1 x Cylindricle Join von Part 3, Part2 mit Part1) und Prismatic Join Part 4 mit Part1)
Genau. du hast jetzt zwei unabhängige Kinematiken, die erstmal nichts miteinander zu tun haben.
Als nächstes kommt ein Parameter ins Spiel: die Zeit. Über die Zeit werden die einzelnen Bewegungen definiert und dadurch die einzelnen Bewegungen miteinander verknüpft. Dabei handelt es sich genau genommen um einen Ersatz für die wirkliche Zeit. Einen Ablauf, der der Echtzeit entspricht, wirst du nicht hinbekommen. Aber das ist ja auch nicht notwendig. CATIA bietet mehrere Möglichkeiten an, Regeln für Bewegungsabläufe zu definieren. Die wohl einsichtigste ist es, sich Kurven im Raum oder in Skizzen zu erstellen.
Ich schlage vor, daß wir sie in Skizzen definieren - viele Techniker können sich bei grafischen Darstellungen mehr vorstellen. Es ist in dem Zusammenhang auch keine schlechte Idee, die Skizzen entsprechend zu benennen. Die erste Skizze ist sehr einfach.
Wir benötigen als Referenz eine Gerade, die die Gesamtzeit darstellt. Die Länge der Geraden entspricht der Gesamtzeit. Sie ist horizontal. Leg sie einfach auf die H-Achse deines Skizzenkoordinatensystems.
Wenn dir die einzelnen Zeitdauern bekannt sind, kannst du die nehmen. Wenn nicht, so nimmst du einfach die jeweiligen Längen der Bewegungsanteile (also bei 30° Schwenk + 50mm Verschiebung 30mm und 80mm). Die zweite Skizze (für die Drehung) ist etwas komplizierter. Sie besteht aus mehreren Geradenstücken. Erst eine Gerade, die ansteigt, dann eine Horizontale, dann wieder eine steigende Gerade. Du bemaßt jetzt jeweils die Endpunkte. In der horizontalen wird der jeweilige Zeitpunkt eingetragen, in der vertikalen der Drehwinkel, den das Part zu dem Zeitpunkt erreicht hat.
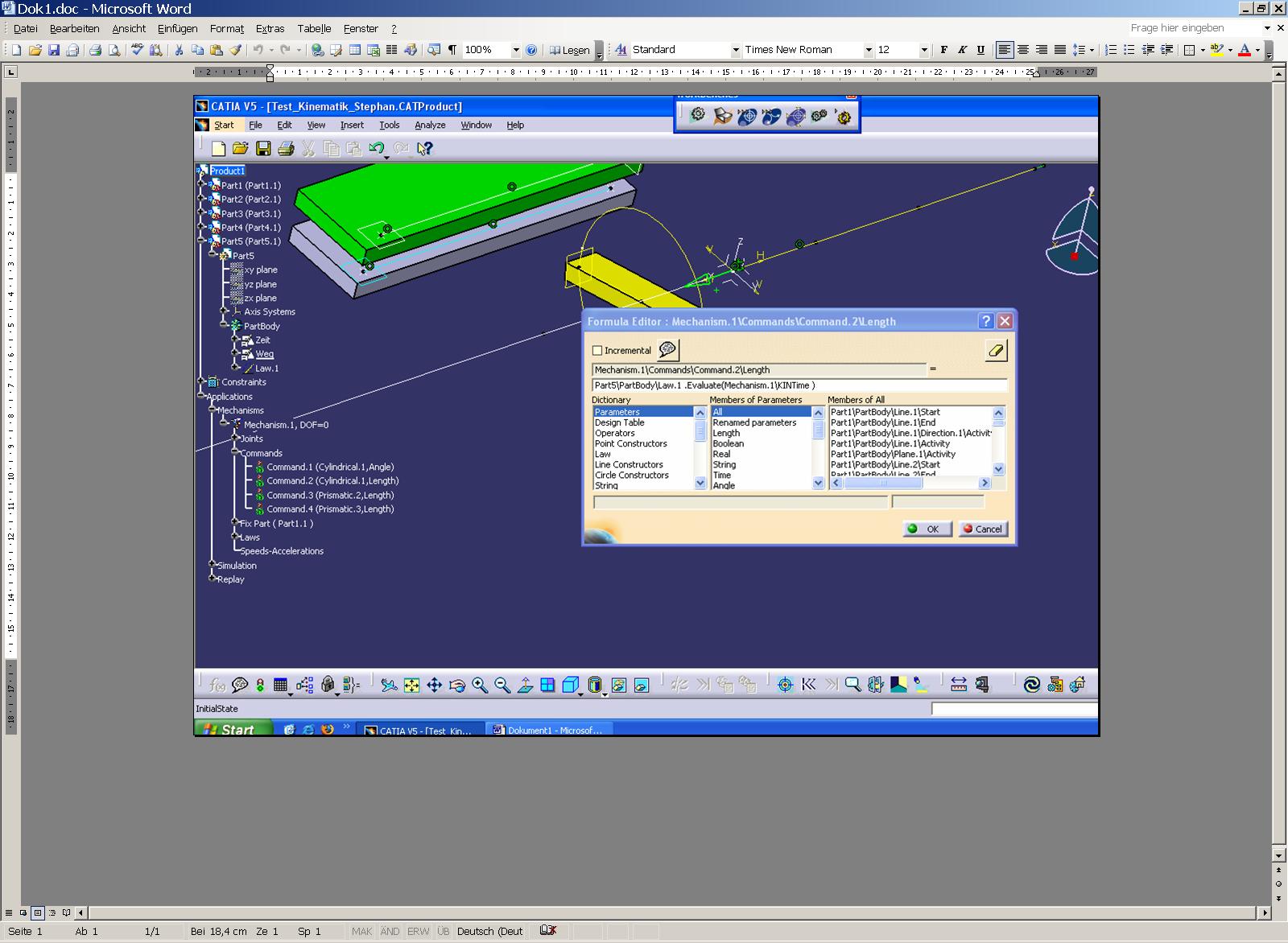
Die Länge dieses Diagramms auf der horizontalen Achse (ich bleibe mal bei der Bezeichnung) entspricht der Gesamtzeit. Das gleiche machst du für die anderen Bewegungen. Da die beiden Verschiebungen gleich sein sollen, reicht dafür eine Kurve. Als nächstes rufst du die Funktion "Law" auf. Du solltest sie in der GSD-Workbench finden (das Icon mit der nach unten geöffneten Parabel). Mit ihr werden aus den Skizzen Regeln definiert. Dabei wählst du die Skizze mit der Horizontalen als Referenz (die Zeitachse) und die jeweilge Kurvenskizze als Definition aus. Für Winkelgesetzes mußt du den Schalter "Heterogenes Gesetz" ("Heterogeneous Law") betätigen, sonst gibt es Probleme. Ist das Gesetz definiert, so erscheint es im Baum. Nun bleibt nur noch, die Laws an die Commands zu hängen.
- Doppelklick auf das jeweilige Command
- Für den Wert den Forrmeleditor aufrufen (RMT)
- Im Formeleditor: PARAMETER-LAW und Doppelklick auf das Law dann
- Im Formeleditor: LAW - EVALUATE
- Im Formeleditor: PARAMETERS - TIME und die KINTIME raussuchen. Ich hab in meiner Online-Doku (zu R15) noch etwas einfacheres gefunden. Da ich es noch nicht testen konnte (Urlaub und keine Kinematiklizenz zur Verfügung), schreibe ich es dir mal ohne Garantie auf Funktionsfähigkeit hin: - Doppelklick auf den Befehl im Baum
- Auf Schalter "Verknüpfen" klicken
- Skizze auswählen. Ich hoffe, du kommst damit etwas weiter. Viele Grüße, CEROG
Viele Grüße,
CEROG PS: In der Literaturliste auf der CATIA-FAQ
findest du auch ein Buch über Bewegungssimulation. Das solltest du dir zulegen. Das DMU-Buch bringt zwar auch etwas dazu, ist aber eher für einen groben überblick geeignet, nicht wenn man sich näher damit beschäftigen will. PPS: Ich entschuldige mich hiermit bei allen freien Trainern und Schulungsunternehmen dafür, daß ich Ihnen mit dieser langen Erklärung einen möglichen Auftrag weggenommen habe. ------------------
Inoffizielle Linux-Hilfeseite
http://www.cad-gaenssler.de |
thomasacro
Ehrenmitglied V.I.P. h.c.
Ingenieur Anwendungsberater

Beiträge: 3734
Registriert: 12.05.2004 V4
V5 2016 - 2020
V6 2016x -2019x
|
erstellt am: 27. Aug. 2006 21:44 <-- editieren / zitieren --> Unities abgeben: Nur für Roebert
|
Ex-Mitglied
|
erstellt am: 28. Aug. 2006 04:52 <-- editieren / zitieren -->
Hallo zusammen, @thomasacro:
danke, Das Heißt, du bist in dem bereich tätig. Ich überlege gerade, solche Sachen ebenfalls zu sammeln, auf ner getrennten Seite und wohl auch außerhalb von cad.de. Viele Grüße, CEROG ------------------
Inoffizielle Linux-Hilfeseite
http://www.cad-gaenssler.de |
Roebert
Mitglied
Beiträge: 23
Registriert: 20.08.2006
|
erstellt am: 28. Aug. 2006 13:09 <-- editieren / zitieren --> Unities abgeben:
|
Catrin
Ehrenmitglied
Ingenieurin Maschinenbau/Informatik
Beiträge: 1929
Registriert: 12.12.2000 HP ZBook 15
Windows 7 / V5R24
|
erstellt am: 28. Aug. 2006 13:32 <-- editieren / zitieren --> Unities abgeben: Nur für Roebert
|
Roebert
Mitglied
Beiträge: 23
Registriert: 20.08.2006
|
erstellt am: 28. Aug. 2006 15:34 <-- editieren / zitieren --> Unities abgeben:
|
Ex-Mitglied
|
erstellt am: 28. Aug. 2006 20:03 <-- editieren / zitieren -->
Hallo Roebert, die Online Dokumentation sollte Euer Admin eigentlich mit V5 installiert haben. Zeitweilig wurde sie auch bei CATIS online angeboten. Leider funktioniert das nicht mehr. Es gibt auch noch eine andere Seite im Inet, die die Dokumentation zur Verfügung stellt. Leider habe ich den Link vergessen. Google war auch nicht sehr hilfreich. Sorry. Viele Grüße, CEROG ------------------
Inoffizielle Linux-Hilfeseite
http://www.cad-gaenssler.de |
Roebert
Mitglied
Beiträge: 23
Registriert: 20.08.2006
|
erstellt am: 29. Aug. 2006 07:31 <-- editieren / zitieren --> Unities abgeben:
Hallo! Es gibt immer noch Probleme.  Hab jetzt mal an einem Beispiel mit nur einer translatorischen Bewegung versucht das zu probieren. Das LAW hab ich in einen seperaten Part vereinbart. Aber bei der Zu**********s LAWS auf das Command (Cylindr. Lenght) gibt es Probleme. Irgendwas muss noch an deiner Beschreibung fehlen, siehe: "Ist das Gesetz definiert, so erscheint es im Baum. Nun bleibt nur noch, die Laws an die Commands zu hängen.
- Doppelklick auf das jeweilige Command
- Für den Wert den Forrmeleditor aufrufen (RMT)
- Im Formeleditor: PARAMETER-LAW und Doppelklick auf das Law dann
- Im Formeleditor: LAW - EVALUATE
- Im Formeleditor: PARAMETERS - TIME und die KINTIME raussuchen. Ich hab in meiner Online-Doku (zu R15) noch etwas einfacheres gefunden. Da ich es noch nicht testen konnte (Urlaub und keine Kinematiklizenz zur Verfügung), schreibe ich es dir mal ohne Garantie auf Funktionsfähigkeit hin: - Doppelklick auf den Befehl im Baum
- Auf Schalter "Verknüpfen" klicken
- Skizze auswählen."
Kannst Du mir noch mal helfen?
Gruss
Robert
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Ex-Mitglied
|
erstellt am: 29. Aug. 2006 21:32 <-- editieren / zitieren -->
Hallo Roebert, leider weiß ich nicht, was du bei deinem Test genau gemacht hast. Wie ist das Getriebe aufgebaut?
Welchen Weg bist du gegangen?
Was ging nicht?
Was gab es für eine Fehlermeldung? Viele Grüße, CEROG
------------------
Inoffizielle Linux-Hilfeseite
http://www.cad-gaenssler.de |
Roebert
Mitglied
Beiträge: 23
Registriert: 20.08.2006
|
erstellt am: 30. Aug. 2006 09:36 <-- editieren / zitieren --> Unities abgeben:
Hallo! Ich habe Probleme im Formeleditor wenn ich dem Befehl der Kinematik "Command/Length" (also die Verschiebelänge) das Law zuweisen will. Wie ist da die genaue Vorgehensweise? Und muss ich der KINTime auch etwas zuweisen oder kann sie variabel bleiben? Gruss
Robert
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Ex-Mitglied
|
erstellt am: 31. Aug. 2006 19:59 <-- editieren / zitieren -->
|
Roebert
Mitglied
Beiträge: 23
Registriert: 20.08.2006
|
erstellt am: 01. Sep. 2006 06:59 <-- editieren / zitieren --> Unities abgeben:
|
corso
Mitglied
Dipl.-Ing. (FH)
Beiträge: 206
Registriert: 18.08.2004 R14 SP5 HF30
|
 erstellt am: 01. Sep. 2006 09:45 <-- editieren / zitieren --> Unities abgeben: Nur für Roebert
erstellt am: 01. Sep. 2006 09:45 <-- editieren / zitieren --> Unities abgeben: Nur für Roebert
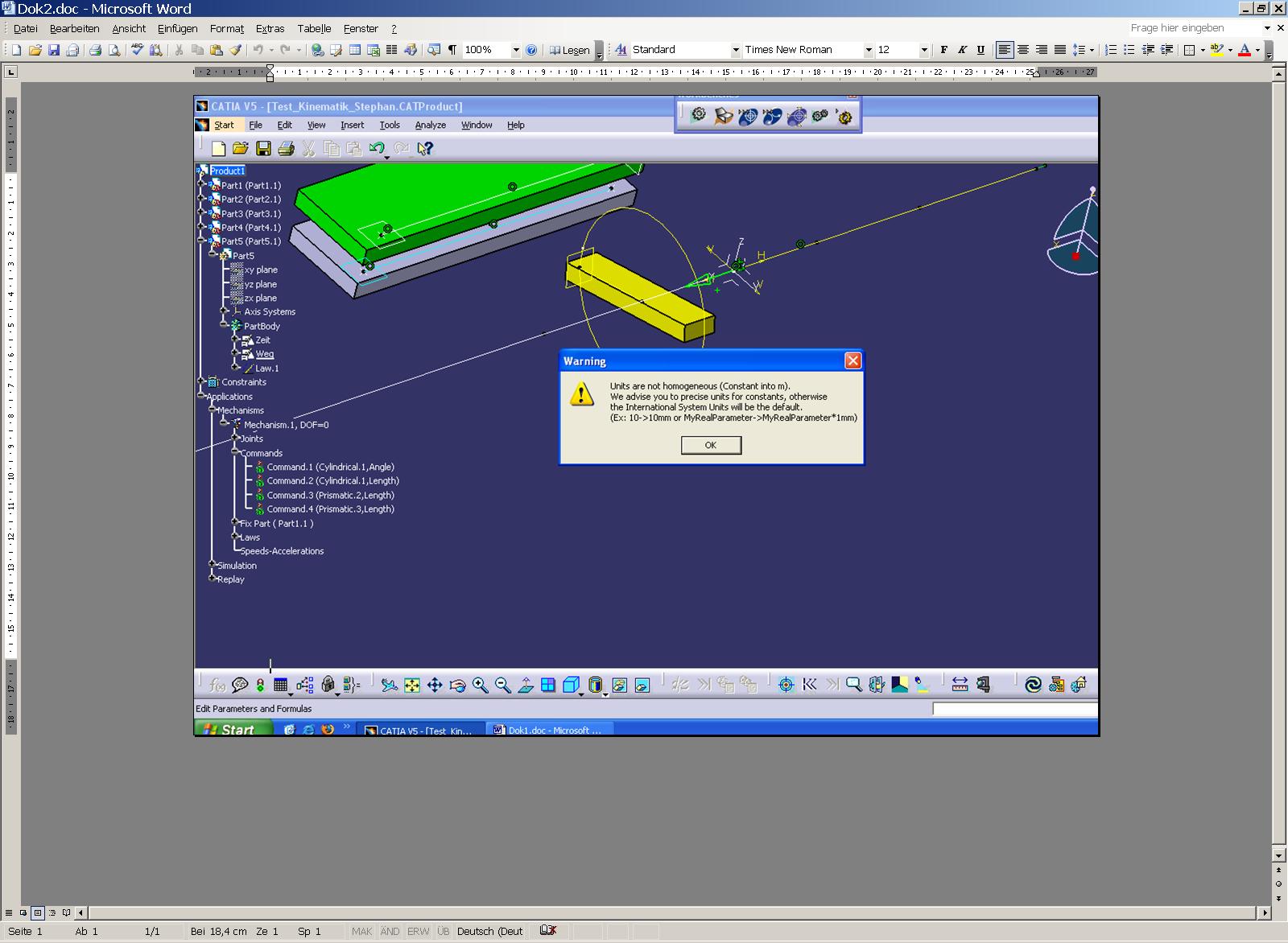
Moin, Dein Command erwartet die Einheit "Länge", also muss Deine Formel das auch ausgeben, sonst kommt die besagte Meldung. Der Befehl "evaluate" gibt aber REAL-Werte zurück, also ohne Einheit. Du musst Deine Formel also noch mit " *1mm " erweitern, dann klappt's auch mit den Einheiten. Gruß
Matthias PS: Wenn Du Deine Kurve skalieren willst, könntest Du statt 1mm auch andere Werte verwenden Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Ex-Mitglied
|
erstellt am: 01. Sep. 2006 16:49 <-- editieren / zitieren -->
Hallo zusammen, @Roebert:
da kam dann ja mal von jemand anders eine Hilfe. Ich würde dir empfehlen, deinen Chef mal nach Schulungen zu fragen.
Z.B. CATIA V5 Grundlagen, CATIA V5 Kinematik oder so. Für dich könnte vielleicht auch diese Seite interessant sein. Viele Grüße, CEROG
------------------
Inoffizielle Linux-Hilfeseite
http://www.cad-gaenssler.de |
catiaklaus
Mitglied
Dipl.-Ing. Maschinenbau
Beiträge: 139
Registriert: 18.03.2004
|
erstellt am: 05. Okt. 2006 13:52 <-- editieren / zitieren --> Unities abgeben: Nur für Roebert
|
Catrin
Ehrenmitglied
Ingenieurin Maschinenbau/Informatik
Beiträge: 1929
Registriert: 12.12.2000 HP ZBook 15
Windows 7 / V5R24
|
erstellt am: 05. Okt. 2006 15:09 <-- editieren / zitieren --> Unities abgeben: Nur für Roebert
Klaus, Du hast voellig recht. Roland und ich waren uns auch nicht einig, ob dies nicht schon weit ueber die noch gerechtfertigte Hilfestellung in einem Forum hinausgeht. So weit wird wohl selbst Roland in Zukunft auch nicht mehr gehen. Hier fehlten Grundwissen und Spezialwissen beim Frager. Auch fuer die Antwortenden wird in Zukunft der Sinn des Forums immer wichtiger. ------------------
CATIS GmbH 38440 Wolfsburg
catrin.eger@catis.de www.catis.de
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Ex-Mitglied
|
erstellt am: 05. Okt. 2006 17:43 <-- editieren / zitieren -->
Hallo zusammen, @catiaklaus:
Das mit der "Überlassung von Arbeitskräften" verstehe ich nicht. Meine Nachforschungen lassen mich darauf schließen, daß Roebert Student ist. Dadurch erklärt sich auch der Link ;-). Ich überlege, den von mir erstellten Text zusammen zu fassen und an geeigneter Stelle zur Verfügung zu Stellen - vielleicht als Tutorial, vielleicht in einem Wiki. Viele Grüße, CEROG PS: Ich werde keine derart aufwendigen Hilfen mehr geben. Und ob ich Roebert überhaupt noch mal antworte, steht auch in den Sternen. ------------------
Inoffizielle Linux-Hilfeseite
http://www.cad-gaenssler.de |

 Foren auf CAD.de
Foren auf CAD.de



 |
|