| | |
 | Gut zu wissen: Hilfreiche Tipps und Tricks aus der Praxis prägnant, und auf den Punkt gebracht für CATIA & Co. |
| | |
 | KISTERS 3DViewStation ist führende Integrationslösung für Visualisierung in Automobil-Produkt-Konfiguratoren, eine Pressemitteilung
|
|
Autor
|
Thema: Kinematik, Beschleunigung, Achsen (2140 mal gelesen)
|
thomasacro
Ehrenmitglied V.I.P. h.c.
Ingenieur Anwendungsberater

   Beiträge: 3734
Registriert: 12.05.2004 V4
V5 2016 - 2020
V6 2016x -2019x
|

 erstellt am: 07. Aug. 2006 15:03
erstellt am: 07. Aug. 2006 15:03  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
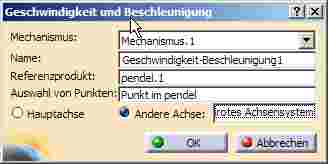
Hallo zusammen, hab da mal ne Frage: Geht um Speed and Acceleration(sorry, habs hier gerade in englisch): Natürlich kann ich dort ein referenzproduct angeben, zu dem die relativgeschwindigkeiten gemessen werden (warum heißt das eigentlich "Product"??? is doch ein part.... aber gut,lassen wir das ;-) ) darunter kann ich den punkt angeben welcher nicht in diesem referenzpart sein sollte um ihn zu messen. ok danach werden mir die kinemtaischen werte in x-,y- und z-Richtung gegeben. sofern ich "Main axis" angewählt habe ist das auch klar! Was geschieht aber, wenn ich auf den zu analysierenden punkt in dessen part ein weitere kreuz erzeuge, und dieses im acceleratin-panel als "other axis" anwähle? das ding dreht sich doch mit! in welcher richtung wird der denn nun analysieren. die graphen sehen bei beiden kinematiken übrigens gleich aus... was also bringt die definition der "other axis" wenn sich das achsenkreuz mitbewegt? vielen Dank,
gruß Tom Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Knowledge
Mitglied
Dipl. Ing.

Beiträge: 106
Registriert: 02.03.2004
|
erstellt am: 17. Aug. 2006 12:13 <-- editieren / zitieren --> Unities abgeben: Nur für thomasacro 
|
Knowledge
Mitglied
Dipl. Ing.
Beiträge: 106
Registriert: 02.03.2004
|
erstellt am: 17. Aug. 2006 12:17 <-- editieren / zitieren --> Unities abgeben: Nur für thomasacro
Du wirst im Falle der lokalen Achsensysteme eine transforamtion zwischen dem Ursprungskoordinatensystem und dem relativkoordinatensystem abfragen. die Veränderungen werden dann als Beschleunigungen und Geschwindigkeiten ausgegeben... also in Abhängigkeit von
Dleta U
Delta V
Delta W
Delte Phi
Delta Xi
Delta Eta (Phi, Xi und Eta sind die loklen Rotationen)
Diese werden dann umgerechnet in eine transformation in XYZ...
Schnapp dir mal den Papula (mathematisches Formelwerk) da steht was zu Vektorrechnung. wird dir helfen die thematik zu verstehen.
Ralf Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
thomasacro
Ehrenmitglied V.I.P. h.c.
Ingenieur Anwendungsberater
Beiträge: 3734
Registriert: 12.05.2004 V4
V5 2016 - 2020
V6 2016x -2019x
|
erstellt am: 17. Aug. 2006 20:59 <-- editieren / zitieren --> Unities abgeben:
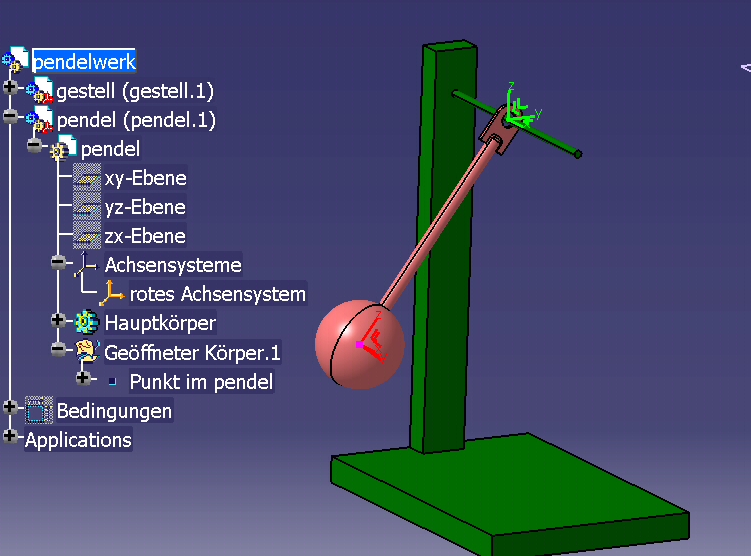
Hallo Ralf, erstmal vielen Dank für deine antwort. das mit der referenz und der reletivbewegung zu diesem ist absolut klar. trotzdem handelt es sich um ein referenzPART und kein referenzPRODUCT, zu dem sich das Teil bewegt, aber mit dieser Differenzierung tat sich CATIA von jeher schwer! Schau dir bitte mal das bild an. ich beobachte den punkt in der mitte der kugel. als referenzsystem definiere ich das rote, welches zur kugel gehört. das achsenkreuz dreht sich folglich mit dem punkt mit. wie sieht das dann jeweils mit den Richtungen aus??? Vielen Dank schonmal, Tom Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
thomasacro
Ehrenmitglied V.I.P. h.c.
Ingenieur Anwendungsberater
Beiträge: 3734
Registriert: 12.05.2004 V4
V5 2016 - 2020
V6 2016x -2019x
|
erstellt am: 17. Aug. 2006 21:00 <-- editieren / zitieren --> Unities abgeben:
|
Knowledge
Mitglied
Dipl. Ing.
Beiträge: 106
Registriert: 02.03.2004
|
erstellt am: 18. Aug. 2006 07:46 <-- editieren / zitieren --> Unities abgeben: Nur für thomasacro
|
thomasacro
Ehrenmitglied V.I.P. h.c.
Ingenieur Anwendungsberater
Beiträge: 3734
Registriert: 12.05.2004 V4
V5 2016 - 2020
V6 2016x -2019x
|
erstellt am: 18. Aug. 2006 09:49 <-- editieren / zitieren --> Unities abgeben:
mist nun habe ich natürlich glatt das falsche bild (fenster.1) mitgeschickt :-( das referenzprodukt sollte natürlich das gestell sein..... wie sieht das denn dann aus? denn das referenzachsenkreuz ist dann nicht in diesem part..? Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Knowledge
Mitglied
Dipl. Ing.
Beiträge: 106
Registriert: 02.03.2004
|
erstellt am: 18. Aug. 2006 10:04 <-- editieren / zitieren --> Unities abgeben: Nur für thomasacro
stell doch einfach mal die cad-daten bereit, ich schaus mir dann mal an... üblicherweise macht die Beschleunigung sinn, wenn du a(t) hast... also
s(t) = Doppelintegral a(t) dt
damit muss s(t) eine kubische funktion sein, damit eine Beschleunigung entsteht. prüfe das, bevor du loslegst... Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
thomasacro
Ehrenmitglied V.I.P. h.c.
Ingenieur Anwendungsberater
Beiträge: 3734
Registriert: 12.05.2004 V4
V5 2016 - 2020
V6 2016x -2019x
|
erstellt am: 18. Aug. 2006 11:06 <-- editieren / zitieren --> Unities abgeben:
hallo ralf, erst noch einmal danke, dass du so intensiv antwortest. so "differenziert" (oder besser "integriert"  ) möchte ich das garnicht betrachten. ich versuchs mal mit einem satz: was geschieht, wenn ich als referenzACHSE(!) ein achsensystem wähle, was sich relativ zum referenzPRODUCT bewegt? die jeweiligen Momentan-Richtungs- und Beschl.-Vektoren ändern sich also ständig... um es vorwegzunehmen: ich habe keinerlei unterschiede der Beschleunigungs- oder Geschwindigkeitswerte oder der graphischen Ausgabe erkennen können! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Knowledge
Mitglied
Dipl. Ing.
Beiträge: 106
Registriert: 02.03.2004
|
erstellt am: 18. Aug. 2006 13:28 <-- editieren / zitieren --> Unities abgeben: Nur für thomasacro
|

 Foren auf CAD.de
Foren auf CAD.de



 |
|