| | |
 | CATIA V5 Grundkurs | Einsteiger - 5 Std. 15 Min 48 |
| | |
 | Qualität sichtbar gemacht, dank leistungsfähiger 3DViewStation Grafik, eine Pressemitteilung
|
|
Autor
|
Thema: DMU-Problem (3305 mal gelesen)
|
elektron
Mitglied

   Beiträge: 15
Registriert: 10.06.2005
|

 erstellt am: 11. Apr. 2006 17:47
erstellt am: 11. Apr. 2006 17:47  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Hallo liebe Catia-Gemeinde ich habe lange hier im Forum nach einer Lösung meines Problemes gesucht. Aber leider nix gefunden bzw das was ich gefunden habe nicht anwenden können.
Folgendes Problem:
Ich habe die tolle Aufgabe einen Bagger in Catia zu zeichnen. Dieser sollte sich auch per DMU-Kinematic bewegen. Also muß ich Mechanismen erzögen. Soweit ist auch alles klar. Ich habe aber nun ein Problem mit den Unterbaugruppen. Also folgendes ich habe einen Hydraulikzylinder konstruiert der eine Unterbaugruppe vom Ausleger darstellt. Dieser Zylinder soll aber den Stiel des Auslegers bewegen. Wie ich hier schon gelesen habe kann ich Mechanismen nicht miteinander verbinden. Soweit klar. Was ich aber nicht verstanden habe ist mit dem flexiblen Objekt. Heißt das, dass ich die Unterbaugruppe Hydraulikzylinder flexibel machen soll und dann in der Baugruppe Ausleger (eine Ebene höher im Strukturbaum) animieren kann mit Hilfe der Gelenke. Also die der Mechanismus kann schon theoretisch simuliert werden nur praktisch sieht man nicht.
Die andere Möglichkeit geht wohl über die Skelettkonstruktion. Oder seh ich das falsch?? Wie Catrin das hier schon öfters beschrieben hat. (Danke). Aber wenn ich die Teile mit Dressup verbinde bewegen sie sich zwar aber dummerweise nicht wie sie sollen. Hier ist die frage wo Catia die Geometrien anhängt. Mir scheint es die Koordinatensysteme sind hier die Einfügepkt. und wenn die sich nicht bewegen bewegen sich auch nicht die angehängten Körper. Oder ist die ansicht falsch oder gar egal.
Vielen Dank für eure Hilfe Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Catrin
Ehrenmitglied
Ingenieurin Maschinenbau/Informatik
Beiträge: 1929
Registriert: 12.12.2000 HP ZBook 15
Windows 7 / V5R24
|
erstellt am: 12. Apr. 2006 07:57 <-- editieren / zitieren --> Unities abgeben: Nur für elektron 
Das sind ein paar viele Fragen auf einmal. Zuerst mal zu Deinem Hydraulikzylinder:
* Laesst er sich den in der Unterbaugruppe bewegen ? Funktioniert das so, wie Du das willst ?
Oder soll sich der Zylinder nicht allein bewegen, sondern nur in der Hauptbaugruppe ? Dann brauchst Du die flexiblen Unterbaugruppen. Vielleicht waere es ganz hilfreich, wenn Du mal ein Bild und die Struktur von Deinem Mechanismus reinstellen koenntest, dann waere ein Tipp sicher einfacher zu geben. * Zum Thema Skelett und Dressup:
Die Elemente werden immer ueber ihre lokale Position an das Skelett gehaengt. Das heisst, wenn Du einen Skelettpunkt hast, um den sich zwei Elemente drehen, dann sollten die wahren Teile dort ebenfalls positioniert sein, so, dass sie sich um diesen Punkt auch drehen koennen.
Wenn Deine teile nach dem Dressup irgendwelche wilden (falschen) Bewegeungen durchfuehren, haengen sie an den falschen Skelettelementen. Beste Gruesse
Catrin ------------------
CATIS GmbH 38444 Wolfsburg
catrin.eger@catis.de www.catis.de
 Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
elektron
Mitglied
Beiträge: 15
Registriert: 10.06.2005
|
erstellt am: 12. Apr. 2006 09:34 <-- editieren / zitieren --> Unities abgeben:
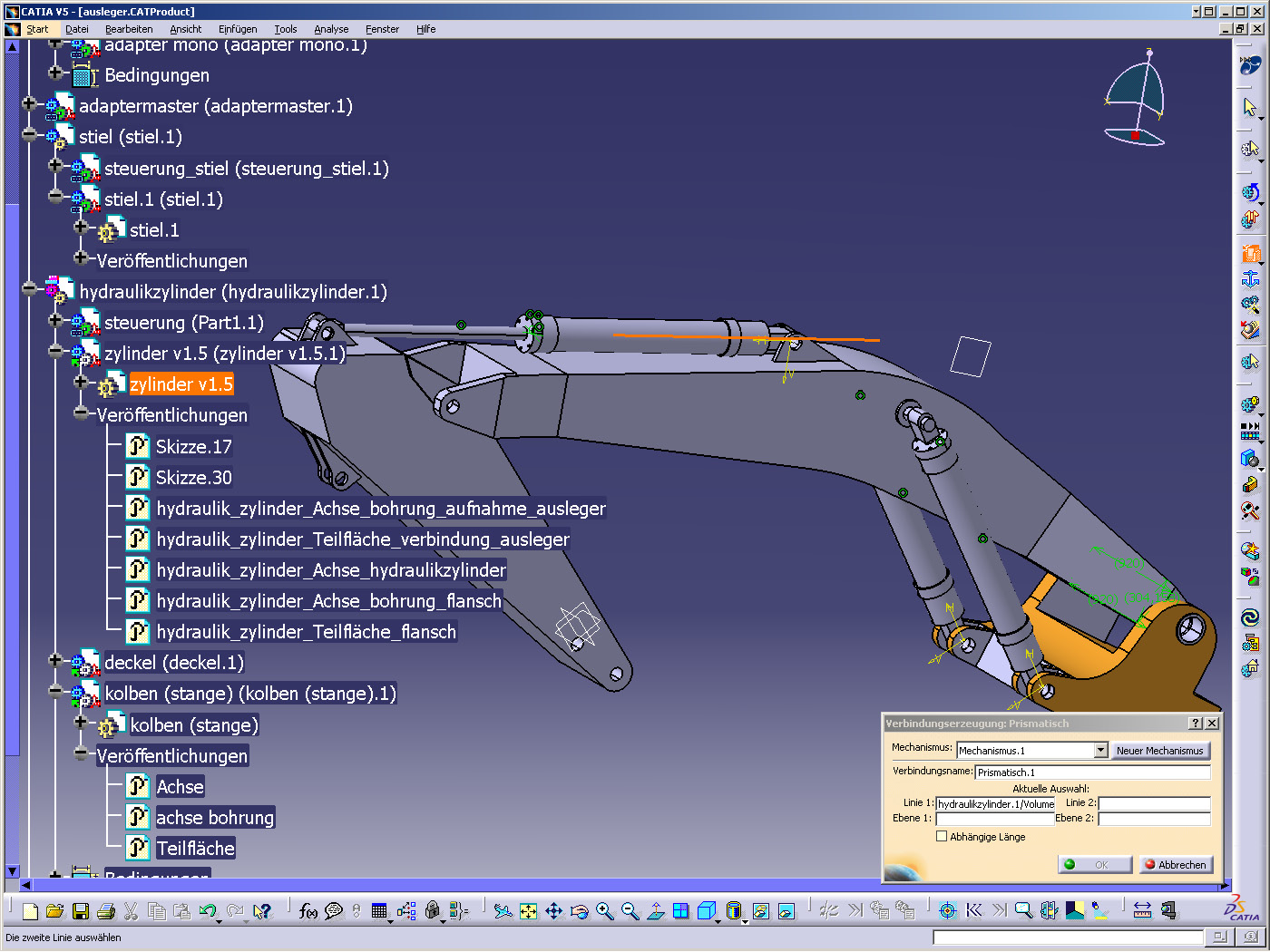
Guten Morgen, sorry wegen den vielen Fragen auf einmal. Aber zum Mechanismus des Hydraulikzylinders. Der Plan war folgender. Ich baue den Ausleger komplett zusammen und erstelle dann den Mechanismus in der Baugruppe des Zusammenbaus. Dies funktioniert aber nicht ohne weiteres weil einige Teile (parts) die sich bewegen sollen in Unterbaugruppen liegen. Ich kann jetzt zwar den Hydraulikzylinder in der Unterbaugruppe animieren. Das funktioniert auch. Aber jetzt kommt ja das bekannte Problem das ich wohl zwei Mechanismen nicht mit einander Verknüpfen kann. Um dieses Problem zu umgehen scheint es mir zwei Wege zu geben (bzw drei der Lösungsvorschlag mit Sequenzierung bzw Terminierung von Mechanismen laß ich mal außen vor weil das kann es ja wohl nicht sein). Einmal das mit der flexiblen Baugruppe (welche muß ich denn da eigentlich als flexibel definieren? Die Unterbaugruppe die sich mit bewegen soll. Oder? Und den Mechanismus lege ich dann in der obersten Baugruppe an?) Oder die Geschichte mit dem Skelett. Scheint mir elegant zu sein. Aber irgendwie fehlt mir noch der entscheidende Schritt. Ich denke ich bin nur einen Klick weit davon entfernt. Mal noch ne allgemeine Frage zum Skelett. Die Dimesionierung spielt keine Rolle? Oder etwa doch? Sollte die Linien und Pkt schon den realen Maßen der späteren Bodies entsprechen. Noch ein paar Worte zu dem Bild. nich verwundern meine Bezeichnungen der Teile sind nicht die besten. Ich arbeite noch dran. Also sich nicht ganz verwirren lassen. Ich hoffe man kann damit was anfangen. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
elektron
Mitglied
Beiträge: 15
Registriert: 10.06.2005
|
erstellt am: 12. Apr. 2006 09:54 <-- editieren / zitieren --> Unities abgeben:
Hallo nochmal, habe jetzt Versucht das Problem mit Hilfe des flexiblen Objekt zu lösen. Keine Chance oder ich bin zu dumm. Folgende Vorgehensweise: Unterbaugruppe flexibel gemacht (hier Hydraulikzylinder). Dann wollte ich ne prismatische Verbindung erstellen. Kann zwar die Achse des Zylinders auswählen aber nich die des Kolbens. Warum??
Danke für die Hilfe. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Catrin
Ehrenmitglied
Ingenieurin Maschinenbau/Informatik
Beiträge: 1929
Registriert: 12.12.2000 HP ZBook 15
Windows 7 / V5R24
|
erstellt am: 13. Apr. 2006 08:50 <-- editieren / zitieren --> Unities abgeben: Nur für elektron
Die Elemente in der Unterbaugruppe sind kontextsensitiv zueinander aufgebaut. Sprich: Du hast Beziehungen zwischen den Teilen beim Konstruieren erzeugt. Das wird deutlich durch die gruenen Pfeile an den Icons der Componenten. Damit hast Du Dir die Moeglichkeit genommen, die Teile nachtraeglich mit Constraints zu verknuepfen. Sie sind ja schon verknuepft, wenn auch ueber konstruktive Links. Leider schliesst fuer die Simulation das eine das andere aus. Dass der Hydraulikzylinder die flexible Baugruppe sein muss, ist absolut korrekt. Zum Skelett: Das Skelett muss natuerlich schon die richtigen Abstaende geometrisch enthalten. Wie sonst soll CATIA denn die richtigen Verfahrwege simulieren, wenn die Basisgeometrie dafuer nicht mit der Realitaet uebereinstimmt. Uebrigens habe ich seit heute das Buch Bewegeungssimulation mit CATIA V5 http://www.hanser.de/buch.asp?isbn=3-446-40320-5&area=Lehrbuch vom Hanser-Verlag im Haus. Da steht eine ganze Menge drin, was Deine Fragen auch beantworten koennte. Schau mal rein, das lohnt sich bestimmt. Gruss
Catrin ------------------
CATIS GmbH 38444 Wolfsburg
catrin.eger@catis.de www.catis.de
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
elektron
Mitglied
Beiträge: 15
Registriert: 10.06.2005
|
erstellt am: 13. Apr. 2006 09:27 <-- editieren / zitieren --> Unities abgeben:
Morgen, also habe ich das richtig verstanden? Die Simulation ist nur mit Hilfe des Skelett möglich? Oder ist sie prinzipiell nicht möglich da die Bauteile bzw Baugruppen im Kontex stehen?
gruß Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Catrin
Ehrenmitglied
Ingenieurin Maschinenbau/Informatik
Beiträge: 1929
Registriert: 12.12.2000 HP ZBook 15
Windows 7 / V5R24
|
erstellt am: 13. Apr. 2006 09:34 <-- editieren / zitieren --> Unities abgeben: Nur für elektron
|
elektron
Mitglied
Beiträge: 15
Registriert: 10.06.2005
|
erstellt am: 13. Apr. 2006 09:52 <-- editieren / zitieren --> Unities abgeben:
|
Catrin
Ehrenmitglied
Ingenieurin Maschinenbau/Informatik
Beiträge: 1929
Registriert: 12.12.2000 HP ZBook 15
Windows 7 / V5R24
|
erstellt am: 13. Apr. 2006 10:05 <-- editieren / zitieren --> Unities abgeben: Nur für elektron
Parametrisierte Bauteile lassen sich sehr wohl gegeneienander bewegen. Teile, die assoziativ zueinander (also in Anhaengigkeit voneiander) konstruiert sind, lassen sich nicht gegeneinander bewegen. Das ist aber korrekt und richtig. Man muss sehr wohl unterscheiden, ob man Parametrisch arbeitet oder Assoziativ. Hier hilft wirklich die Skelett-Methode.
Wir erstellen zuerst das Skelett mit den Hauptabmessungen. Die entsprechenden Punkte und Linien geben die Positionen der Baiteile vor. Dann werden diese Punkte und Linien veroeffentlicht und als Referenzen fuer die wahren Bauteile benutzt. Es werden also Assoziativitaeten zwischen Skelett und Bauteil erzeugt, niemals nicht zwischen Bauteil und Bauteil. Damit kannst Du zum einen die Bauteile gegeneinander bewegen und zum anderen hast Du trotzdem die assoziative Aenderung der Elemente, wenn sich die Skelettelemente aendern. Gruss
Catrin ------------------
CATIS GmbH 38444 Wolfsburg
catrin.eger@catis.de www.catis.de
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
elektron
Mitglied
Beiträge: 15
Registriert: 10.06.2005
|
erstellt am: 13. Apr. 2006 10:55 <-- editieren / zitieren --> Unities abgeben:
Ich weiß, dass die Frage nicht unbedingt hierher gehört. Aber trotzdem. Wie ist es am vorteilhaftesten wenn man in jede Baugrupe ein Skelett hat. Oder ein einziges Skelett für die geasmte Konstruktion. Ich weiß ich tu mich unheimlich schwer mit der Catia-Konstruktionsmethodik. Irgendwie ist das auch in der Literatur nicht wirklich hilfreich beschrieben und es sehr mühsam sich da durchzukämpfen. Aber danke für deine Mühe und deine Erklärungen. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Catrin
Ehrenmitglied
Ingenieurin Maschinenbau/Informatik
Beiträge: 1929
Registriert: 12.12.2000 HP ZBook 15
Windows 7 / V5R24
|
erstellt am: 13. Apr. 2006 11:12 <-- editieren / zitieren --> Unities abgeben: Nur für elektron
Das kommt ganz auf die Baugruppe an. Wenn es Teile sind, die sich wie in Deinem fall wirklich assoziativ zueinander aendern, ist es immer gut, in jede Baugruppe ein Skelett zu packen. Die Struktur sieht bei uns dann so aus:
Code:
Produkt
|
+Produkt Skelett
| |
| +Part1_Skelettelement
| |
| +Part2_Skelettelement
| |
| +...
|
+Produkt_Bauteile
|
+Part1_Bauteil
|
+Part2_Bauteil
|
+...
Je nachdem, wie komplex das ganze Thema ist, wird manchmal sogar noch ein Bereich DMU zwischengeschaltet, um die Simulation nicht mit den realen Bauteilen zu machen.
Die Kinematik wird dann auf die DMU-Teile (also die "dummen" Solids und Flaechen) gemacht, die an dem Skelett haengen ueber DRESSUP. Konstruiert wird aber in den wirklich realen Bauteilen, die mit Constraints an das Skelett gehaengt werden. PS: Das Thema gehoert durchaus hierher. Kinematik besteht nun mal nicht nur aus der reinen Simulation sondern sehr wohl auch aus Methoden, mikt denen man so eine Sache auch effektiv machen kann. Nur Teile drehen ist ja easy, wie man aber komplexe Baugruppen wirklich gut konstruiert, sumliert und aendert, das muss wirklich erarbeitet werden. Deine Fragen sind hier also voellig richtig. Gruss
Catrin ------------------
CATIS GmbH 38444 Wolfsburg
catrin.eger@catis.de www.catis.de
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
elektron
Mitglied
Beiträge: 15
Registriert: 10.06.2005
|
erstellt am: 13. Apr. 2006 16:03 <-- editieren / zitieren --> Unities abgeben:
Ok, danke für deine Aufmunderungen. Aber iregdwie nehmen die Fragen kein ende. Der von dir beschriebene Aufbau stellt die unterste Ebene dar? Wenn ich jetzt dieses Produkt wiederum in ein anderes Produkt einfüge werden dann die Skelettprodukte der Unterbaugruppe mit in die Übergeordnet Baugruppe exportiert bzw importiert. Sprich ich habe dann irgendwann ein Skelett Produkt wo quasi die ganzen Unterbauskelette enthalten sind?? Habe ich das jetzt soweit richtig verstanden? Ich wünsche allen ein frohes Osterfest. Und vor allem ein erholsames. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Catrin
Ehrenmitglied
Ingenieurin Maschinenbau/Informatik
Beiträge: 1929
Registriert: 12.12.2000 HP ZBook 15
Windows 7 / V5R24
|
erstellt am: 19. Apr. 2006 12:52 <-- editieren / zitieren --> Unities abgeben: Nur für elektron
Hallo elektron, Jetzt verstehe ich Deine Frage nicht. Wieso unterste Ebene  ?? ?? Es ist ein Beispiel, wie man ein Produkt strukturieren kann, in dem
1. ein Skelett enthalten ist,
2. wahre geometrie an das Skelett angebunden wird
3. kinematik erzeugt wird, welche an das Skelett angebracht wird
4. leicht zu erweitern und noch nach unten tiefer oder nach oben hoeher zu schachteln ist. Gruss
Catrin ------------------
CATIS GmbH 38444 Wolfsburg
catrin.eger@catis.de www.catis.de
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
elektron
Mitglied
Beiträge: 15
Registriert: 10.06.2005
|
erstellt am: 20. Apr. 2006 16:32 <-- editieren / zitieren --> Unities abgeben:
Hallo, ok war ein bißchen umständlich ausgedrückt. Sorry. Ich wollte damit ausdrücken,dass dies der prinzipielle Aufbau eines Produkt sein sollte (könnte). Natürlich kann man die nach oben und unten in der Struktur erweitern. Danke erstmal soweit. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de
Foren auf CAD.de



 |
|