Hallo Mentesis,
also ich sehe das so:
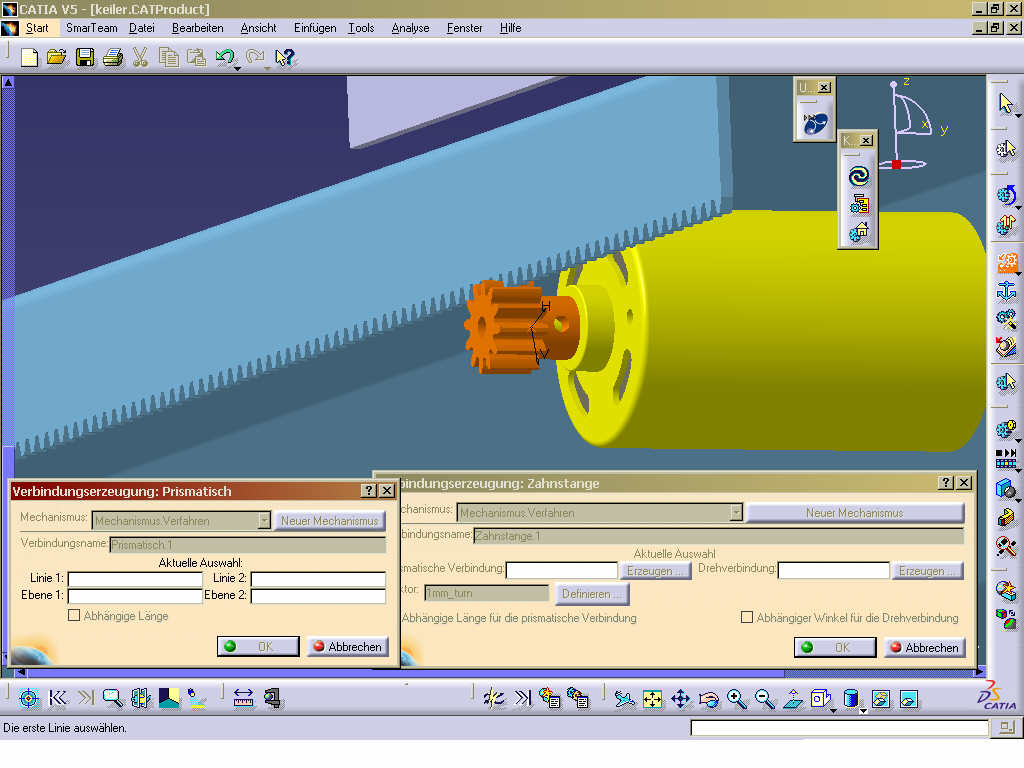
Du hast ein Zahnrad, das sich um eine Achse dreht, die auf einer Schiene angebracht ist und eine Zahnstange, die am Gleitlager angeschweißt ist, auf der sich die Schiene mit dem Zahnrad prismatisch bewegt. Richtig? Und eine Zahnstangenverbindung ist nichts anderes als eine Dreh- und eine Prismatische Verbindung, deren Bewegungen voneinander abhängig sind: Wenn sich das Rad dreht verschiebt sich die Leiste oder umgekehrt, und wie und ob das im Modell mechanisch fünktioniert ist zunächst völlig uninterressant.
Damit must Du zunächst nur drei Teile (CatPart) haben: Zahnstange", Zahnrad" und Schiene". An der Schiene muss sich die Achse für das Zahnrad befinden! Die Drehverbindung ist Zahnrad" gegen Schiene", die Prismatische Verbindung ist Schiene" gegen Zahnstange". Die Dreh- und die Prismatische Verbindung kannst Du vorab getrennt oder zusammen mit der Zahnstangenverbindung erzeugen, in letzterem Fall will die Zahnstangenverbindung nur noch die Namen der beiden Verbindungen und den Faktor wissen und ob Du am Zahnrad drehen oder an der Zahnstange schieben willst.
Wie bei allen Kinematiken musst Du dann noch durch Angabe des Fix-Teils festlegen, was sich nicht bewegen soll, in deinem Fall ist die Zahnstange Fix. Bingo!
Nun zu Deinem Problem mit der Rotation und den Ebenen: Bei der Definition musst Du zunächst die Rotationsache des rotierenden Teils (Zahnrad") mit dem Achslager im anderen Teil (Schiene") zusammenbringen. Dann kann sich das rotierende Teil jedoch (im Gegenteil zur 3D-Kinematik von V4) noch auf der Achse verschieben. Das musst Du durch die zwei Ebenen (können auch eben Flächen sein), in den beiseden sich bewegenden Teile und ihrem gegenseitigen Abstand (kann Null sein) verhindern. Die Ebenen müssen also normal zur Achse sein!
Dasselbe Problem ergibt sich auch bei der Prismatischen Verbindung: Auch hier können sich in V5 die beiden Teile noch um die Schiebeachse drehen, was durch zwei kongruente Ebenen verhindert werden muss.
Alles klar?
Viel Glück,

m.f.G.
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP

 Foren auf CAD.de
Foren auf CAD.de



 |
| 


















 Habe dazu leider keine Anleitung gefunden.
Habe dazu leider keine Anleitung gefunden.

 Inoffizielle Linux-Hilfeseite
Inoffizielle Linux-Hilfeseite