| | |
 | Gut zu wissen: Hilfreiche Tipps und Tricks aus der Praxis prägnant, und auf den Punkt gebracht für CATIA & Co. |
| | |
 | Selektieren und Filtern in 3D-CAD-Baugruppen: Schnellere Übersicht und weniger Aufwand, eine Pressemitteilung
|
|
Autor
|
Thema: Simulation Radaufhängung Kugelgelenke (6354 mal gelesen)
|
Neil
Mitglied
   Beiträge: 3
Registriert: 01.02.2006
|

 erstellt am: 01. Feb. 2006 23:56
erstellt am: 01. Feb. 2006 23:56  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
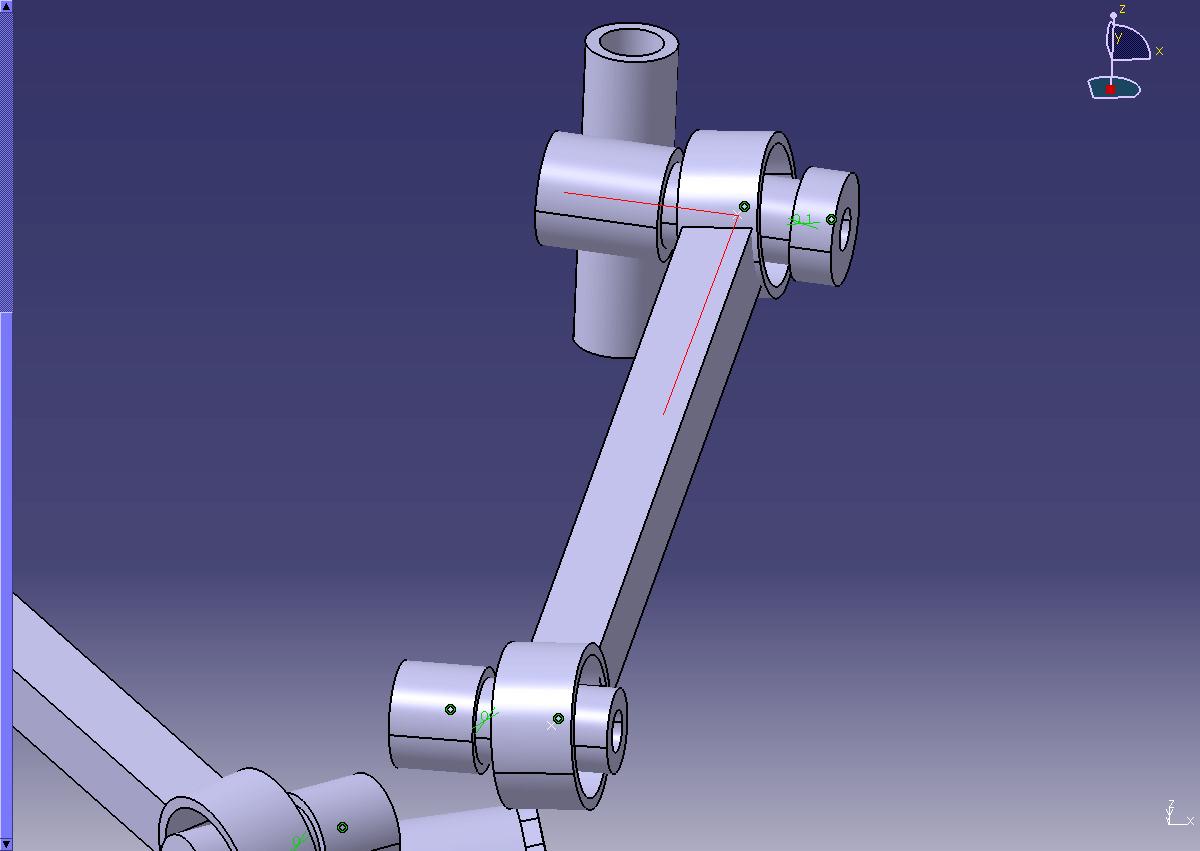
Schönen guten Abend, ich beschäftige mich im Moment damit eine Radaufhängung zu simulieren. Das Problem dabei sind die vielen Fahrwerksbuchsen aus Gummi. Diese erlauben ja theoretisch Bewegungen wie eine Kugelgelenkverbindung. Sie gleichen Winkelfehler aus und spannen die Teile gegeneinander um Geräusche zu vermeiden. Ich habe mal ein Bild mit einem Lenker beigefügt. Dieser ähnelt einem Knochen. An beiden Enden sitzen im realen Teil Gummibuchsen. Diese habe ich durch jeweils eine Buchse ersetzt und mit einer Kugelgelenkverbindung am Lenker verbunden. Die Buchsen sind mit Drehverbindungen am Achstäger und an der Radnabe verbunden. Der Lenker ist jetzt verstänlicher weise lose. Da er sich ja aufgrund der beiden Kugelgelenkverbindungen auf seiner Mittelachse drehen kann. Die Achsen stehen nicht kongruent zueinander, haben also Winkelfehler die sich beim einfedern verändern. Hat jemand eine Idee wie man die Kugelgelenkverbindungen ersetzen kann. Oder soll ich die Lenker irgendwie mit Hilfe prismatischer Verbindungen in einer Richtung fixieren. Danke für Eure hoffentlich zahlreichen Antworten. mfG Dennis Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
gle
Mitglied
Konstrukteur

Beiträge: 195
Registriert: 05.12.2004
|
erstellt am: 02. Feb. 2006 00:26 <-- editieren / zitieren --> Unities abgeben: Nur für Neil 
Hallo Neil und herzlich Willkommen auf cad.de Wis sieht die Sache aus, wenn du die verdrehstabilen Rohre durch offene, verdrehweiche Profile ersetzen würdest? Natürlich werden die Gummilager immer noch benötigt. Das Stangenprofil so ausbilden, dass die stabilität aber erhalten bleibt. Schönen Gruss und gute Nacht --gle-- 
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Neil
Mitglied
Beiträge: 3
Registriert: 01.02.2006
|
erstellt am: 02. Feb. 2006 23:28 <-- editieren / zitieren --> Unities abgeben:
Hi, danke für die Idee. Wie kann ich denn die Verdrehung der Profile dann im DMU simulieren? Das liefe dann doch über Kräfte, Flächenträgheitsmoment... Hast Du vielleicht ein Beispiel. mfG Dennis Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
oflow5
Mitglied
Student
Beiträge: 28
Registriert: 22.09.2005
|
 erstellt am: 04. Feb. 2006 13:34 <-- editieren / zitieren --> Unities abgeben: Nur für Neil
erstellt am: 04. Feb. 2006 13:34 <-- editieren / zitieren --> Unities abgeben: Nur für Neil
Du könntest in den Gelenken Spherical Joints verwenden, somit erhältst du um einen Punkt drehbare Gelenke. Für die Freiheitsgrade einfach noch auf einer Seite des Lenkers einen Planar Joint auf zwei Planes setzen, wenn möglich. Die Torsion der Profile ist nicht im DMU zu simulieren, es handelt sich hier lediglich um Kinematik! Viel Erfolg! [Diese Nachricht wurde von oflow5 am 04. Feb. 2006 editiert.] [Diese Nachricht wurde von oflow5 am 04. Feb. 2006 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Neil
Mitglied
Beiträge: 3
Registriert: 01.02.2006
|
erstellt am: 07. Feb. 2006 00:11 <-- editieren / zitieren --> Unities abgeben:
Das mit den spherical joints habe ich ja schon realisiert. Nur das Problem mit den Freiheitsgraden habe ich noch nicht gelöst. Ich probier das mit dem planar joint mal aus. Danke. Ich fürchte aber es wird nicht funktionieren, da sich die Radnabe auch nach vorne und hinten bewegen wird( Spuränderung). Ich bräuchte sowas wie ein Linie Ebene Gelenk. Ich weiß das Thema wurde hier schon öfter angesprochen, aber alle Antworten in der Suche halfen nicht bei dem Problem. Die anderen Leute haben dann irgenwie einen workaround für ihr Problem benutzt. Was mich ärgert ist, dass das Problem eigentlich recht simpel ist aber die Abbildung im CAD nicht klappen will. Naja.
mfG
Dennis
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
OregonCAD
Mitglied
Beiträge: 4
Registriert: 13.04.2005
|
erstellt am: 12. Feb. 2006 20:13 <-- editieren / zitieren --> Unities abgeben: Nur für Neil
|
Knowledge
Mitglied
Dipl. Ing.
Beiträge: 106
Registriert: 02.03.2004
|
erstellt am: 13. Feb. 2006 08:05 <-- editieren / zitieren --> Unities abgeben: Nur für Neil
Guten Morgen, hier noch einmal zum mitschreiben. 1. Verbindung:
Rotatorische Verbindung -> zw. Zahnrad und Motor (dat gelbe ding)
2. Verbindung:
Translatorische Bewegung -> zw. der ZAhnstange, und dem Bauteil,
auf dem die zahnstange laufen soll.
3. Verbindung:
Zahnstangenverbindung.
Unter Zuhilfenahme der Verbinzungen zu 1 und zu 2 wird nun eine
Zahnstangenverbindung erzeugt. (bitte nicht vergessen, den
Wirkradius des Zahnrades anzugeben. (in dem Feld, wo üblicherweise
1 mm_turn drinsteht.
4. Antrieb.
Der Antrieb kann entweder innerhalb der zahnstangenverbindung
gesetzt werden, oder muss über eine weitere kinematische Verbindung
definiert werden. Solltest du auch mit dieser Beschreibung nicht zurande kommen, melde dich, und stelle mit einige Beuteile zur Verfügung. Gruß Ralf Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Günthi
Mitglied
Beiträge: 2
Registriert: 25.11.2005
|
erstellt am: 15. Feb. 2006 10:48 <-- editieren / zitieren --> Unities abgeben: Nur für Neil
Tach, Hab das selbe Problem wie Neil.
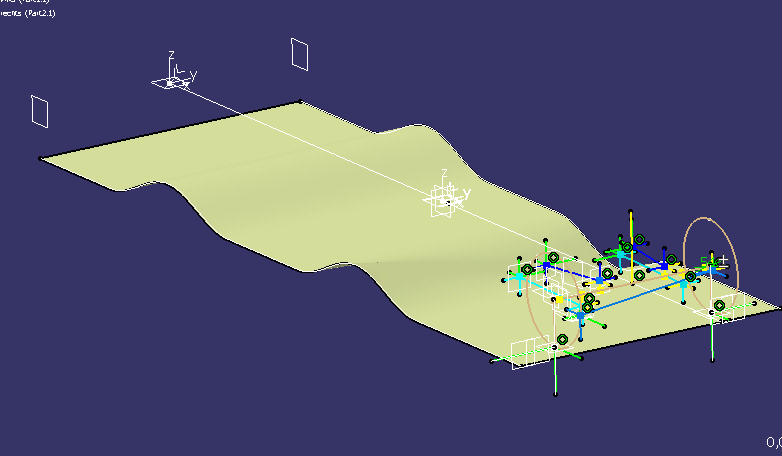
Es soll eine komplette Hinterachse simuliert werden.
Als Antrieb hab ich mir eine Straße ausgedacht, die ich unter der Achse durchziehen will.
Die Räder will ich über eine Punkt/Fläche Verbindung anbinden.
Solangen ich das ohne die Lenker simuliere funktioniert das auch tadellos. Das Problem beginnt, wenn ich die Verbindung der Lenker über U-Joints herstelle.
Irgendwie klemmt dann alles (wenn ich es mal schaffe, auf 0-Freiheitgrade zu kommen). Und sogar die Straße hat sich schon anch unten wegbewegt obwohl sie prismatisch am fixed-Part geführt wird!?
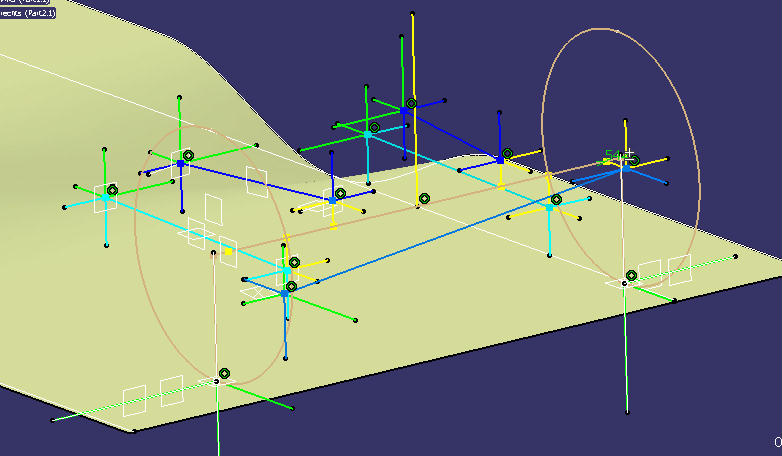
Was macht dieser U-Joint eigendlich? Kann man damit wirklich kardanische Verbindungen herstellen? In der Catia-Hilfe ist die Beschreibung nicht so ganz erschöpfend.
Leider bin ich mit der Beschreibung von Ralf auch nicht klar gekommen.
Die Hinterachse macht durch die Lenker und den Panhardstab eine räumliche Bewegung. Hoffe, dafür gibt´s ne Lösung
MfG
Günther Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
mansouri
Mitglied
Beiträge: 1
Registriert: 25.09.2007
|
 erstellt am: 25. Sep. 2007 13:45 <-- editieren / zitieren --> Unities abgeben: Nur für Neil
erstellt am: 25. Sep. 2007 13:45 <-- editieren / zitieren --> Unities abgeben: Nur für Neil
Lieber Dennis, Attached Ich send Dir einige Dateien. Ich hoffe dass sie Dir helfen. Wenn Du noch Hilfe Brauchst, kannst Du mir einfach schreiben. Wir beschaeftigen uns mit Lenksysteme. MFG hamid.mansouri@dr.com  Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de
Foren auf CAD.de



 |
|