| | |
 | CATIA V5 Grundkurs | Einsteiger - 5 Std. 15 Min 48 |
| | |
 | KISTERS 3DViewStation: Multitalent für Branchen und Nischenmärkte, eine Pressemitteilung
|
|
Autor
|
Thema: Freiheitsgrad bei Welle mit zwei Kugelenden (2982 mal gelesen)
|
Klaus Stutzmann
Mitglied

   Beiträge: 51
Registriert: 12.08.2002
|

 erstellt am: 13. Jan. 2006 07:58
erstellt am: 13. Jan. 2006 07:58  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Hallo, wie kann ich den letzten verbleibenden Freiheitsgrad einer Welle mit zwei Kugeln an den Enden festlegen? Jede Kugel mit Sphärisch verbunden. Die Welle kann sich somit natürlich um die eigene Achse drehen. Oder liegt es gar nicht an den Kugeln? Kann in Catia irgend wie angezeigt werden an welchen Parts noch offene Freiheitsgrade sind? Gruß Klaus Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Catrin
Ehrenmitglied
Ingenieurin Maschinenbau/Informatik
Beiträge: 1929
Registriert: 12.12.2000 HP ZBook 15
Windows 7 / V5R24
|
 erstellt am: 13. Jan. 2006 09:03 <-- editieren / zitieren --> Unities abgeben: Nur für Klaus Stutzmann
erstellt am: 13. Jan. 2006 09:03 <-- editieren / zitieren --> Unities abgeben: Nur für Klaus Stutzmann 
Klaus, hast Du ein Bild davon ? Ich kann mir unter Deiner Beschreibung nix vorstellen. Wenn sich eine Welle in einem lager dreht, benutzt man im Normalfall den Joint Revolute. Damit definierst Du, das sich die Welle nur um Ihre Achse drehen kann, nicht aber eine axiale Verschiebung moeglich ist. Kugeln am Ende einer Weille  Was bedeutet das ? Was bedeutet das ? Gruss
Catrin ------------------
CATIS GmbH 38444 Wolfsburg
catrin.eger@catis.de www.catis.de
 Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
corso
Mitglied
Dipl.-Ing. (FH)
Beiträge: 206
Registriert: 18.08.2004 R14 SP5 HF30
|
 erstellt am: 13. Jan. 2006 09:20 <-- editieren / zitieren --> Unities abgeben: Nur für Klaus Stutzmann
erstellt am: 13. Jan. 2006 09:20 <-- editieren / zitieren --> Unities abgeben: Nur für Klaus Stutzmann
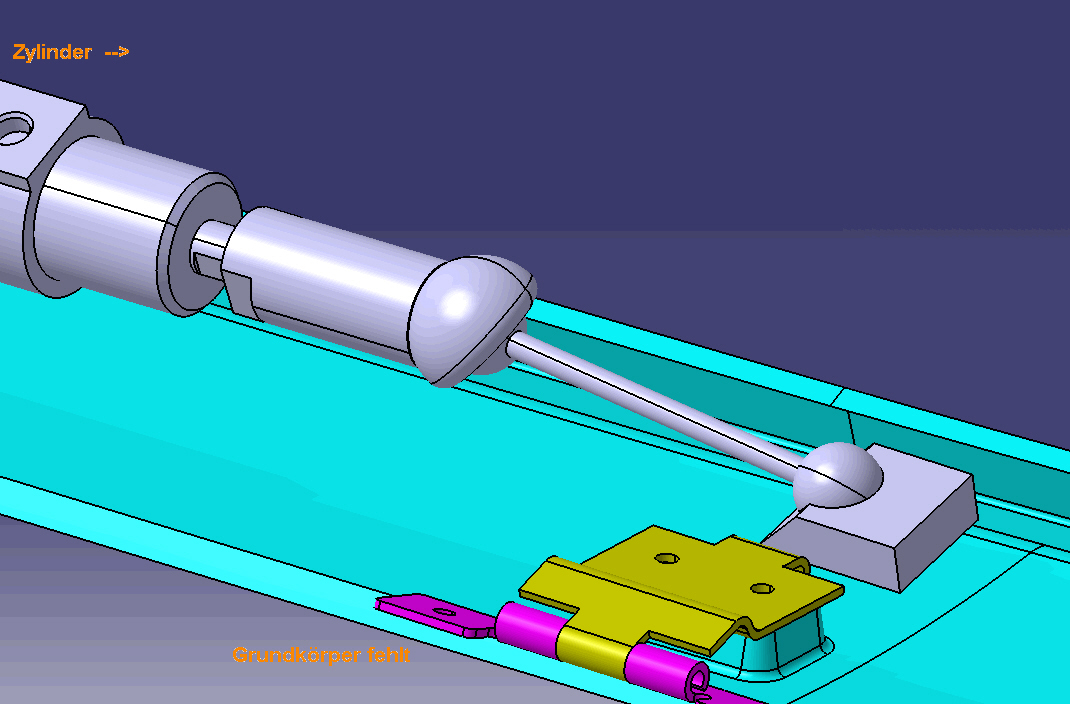
Guten Morgen, Dieses Problem kommt leider nur allzu häufig vor, ich hab's speziell immer dann, wenn ich eine Gasfeder einbauen will. Die Sache ist halt nunmal die, dass dieser Mechanismus von Natur aus nunmal unbestimmt ist, wie Du ja schon richtig erkannt hast (die Drehung um die Achse, welche durch die zwei Spherical-Anbindungspunkte verläuft).
In der Realität (z.B. bei einer Gasfeder) ist das einem ja egal, da es die Funktion nicht behindert, aber CATIA kann nunmal keine Unterbestimmten Systeme simulieren...
Was also tun? Die schnelle, gängige (aber leider etwas unsaubere) Methode ist, das eine Kugelgelenk durch einen U-Joint zu ersetzen. Hierdurch wird der verbliebene Freiheitsgrad belegt, allerdings dreht sich die Welle bei der Simulation immer mit. Gruß
Matthias Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Klaus Stutzmann
Mitglied
Beiträge: 51
Registriert: 12.08.2002
|
erstellt am: 13. Jan. 2006 09:25 <-- editieren / zitieren --> Unities abgeben:
|
Catrin
Ehrenmitglied
Ingenieurin Maschinenbau/Informatik
Beiträge: 1929
Registriert: 12.12.2000 HP ZBook 15
Windows 7 / V5R24
|
erstellt am: 13. Jan. 2006 09:48 <-- editieren / zitieren --> Unities abgeben: Nur für Klaus Stutzmann
Ahja, alles klar. Also U-Joint waere wohl ok, nur dann hast Du eben eine Drehung innerhalb der Welle, die Du nicht beeinflussen kannst. Besser ist gaub ich eine andere Variante.
Bau Dir ein zusaetzliches Skelettteil rein mit Punkt und Drehachsen im Punkt. Dann erzeuge jeweils Revolte-Joints zwischen Gehauese - Hilfselement und Hilfselement - Wellenkugel. Die Drehungen belegst Du jeweils mit einem Command. Wenn bei der Simulation das Command konstant auf 0 bleibt, ist der Freiheitsgrad belegt und Dein getribe bewegt sich so, wie Du willst. Falls die Drehung doch stattfinden soll (und meistens tut sie das ja auch), kannst Du sie ueber das Command steuern. Gruss
Catrin ------------------
CATIS GmbH 38444 Wolfsburg
catrin.eger@catis.de www.catis.de
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Der Odin
Mitglied
Produktkonstrukteur
Beiträge: 16
Registriert: 30.11.2006
|
 erstellt am: 06. Dez. 2006 19:23 <-- editieren / zitieren --> Unities abgeben: Nur für Klaus Stutzmann
erstellt am: 06. Dez. 2006 19:23 <-- editieren / zitieren --> Unities abgeben: Nur für Klaus Stutzmann
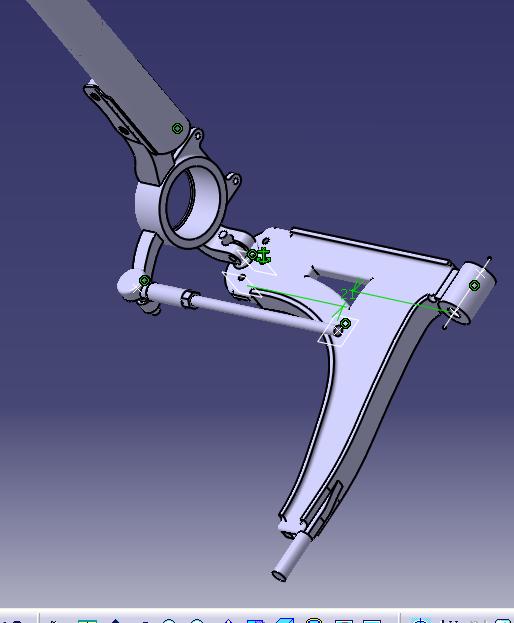
Mein Problem is ähnlich wie das oben genannte. Ich versuche eine Radaufhängung zum Einfedern zu bringen, aber scheitere an der Spurstange mit den beiden sphärischen Verbindungen an jedem Ende. Wie ja oben schon gesagt, liegt der Fehler mit hoher Wahrscheinlichkeit an der Verdrehung der Spurstange. Die Lösung mit dem Hilfsskelett bringt mir auch nicht viel, weil ich keine konstanten Punkte am Gehäuse hab, die ich als Referenz nehmen könnt. Oder ich hab die Anleitung oben nicht richtig verstanden. Vlt habt ihr noch eine Ideen. Thx im Voraus PS: Zur besseren Vorstellung hab ich ma ein Pic angehängt. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Der Odin
Mitglied
Produktkonstrukteur
Beiträge: 16
Registriert: 30.11.2006
|
erstellt am: 07. Dez. 2006 08:07 <-- editieren / zitieren --> Unities abgeben: Nur für Klaus Stutzmann
|
predy
Mitglied
Industriedesigner
Beiträge: 777
Registriert: 05.07.2003 CATIA V5R16 SP3 64Bit
Windows XP Pro X64 Edition
2x Intel Xeon 3.6GHz 4GB RAM
Nvidia Quadro FX 3450/4000 SDI 256MB
|
erstellt am: 07. Dez. 2006 09:07 <-- editieren / zitieren --> Unities abgeben: Nur für Klaus Stutzmann
|
phimUoB
Mitglied
Ingenieur
Beiträge: 107
Registriert: 08.08.2003 CATIA/Smarteam V5R16
Linux, Oracle, VMWare
|
erstellt am: 07. Dez. 2006 14:04 <-- editieren / zitieren --> Unities abgeben: Nur für Klaus Stutzmann
Hallo, Wir haben bei uns gerade ein ähnliches Problem. Bei den meisten Joint-Arten werden ja gleich die entsprechenden Constraints miterzeugt. Eigenartigerweise ist das aber bei einem U-Joint nicht der Fall. Das Product bleibt ja so unterbestimmt (Analyze -> Constraints). Soll man da im Fall eines Kugelgelenks noch weitere Constraints setzen? Gruss, Beat Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Catrin
Ehrenmitglied
Ingenieurin Maschinenbau/Informatik
Beiträge: 1929
Registriert: 12.12.2000
|
erstellt am: 07. Dez. 2006 15:50 <-- editieren / zitieren --> Unities abgeben: Nur für Klaus Stutzmann
Nicht alle Joints erzeugen auch Assembly Conastraints. Nur die Joints bis zum Rigid tun dies (sie werden deshalb auch als Assembly Joints bezeichnet). Es nuetzte auch nichts, zusaetzliche Constraints zu erzeugen, sie werden in der Kinematik niht unbedingt beruecksichtiogt, manche werden ignoeriert, manche fallen uns auf die Fuesse beim Bewegen. Auf jeden Fall MUESSEN alle Freiheitsgrade ueber die Kinematik abgedeckt werden. Nur, wenn der kinematische Mechanismus vollstaendig bestimmt ist, laesst sich die ganze Geschichte auch wirklich bewegen. Gruss
Catrin ------------------
CATIS GmbH 38440 Wolfsburg
catrin.eger@catis.de www.catis.de
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
phimUoB
Mitglied
Ingenieur
Beiträge: 107
Registriert: 08.08.2003 CATIA/Smarteam V5R16
Linux, Oracle, VMWare
|
erstellt am: 07. Dez. 2006 17:00 <-- editieren / zitieren --> Unities abgeben: Nur für Klaus Stutzmann
Hmm, OK. In der Kinematik ist alles gut, und simulierbar. Wo es dann aber klemmt ist in einem übergelagerten Produkt wo die Kinematik als Flexible Sub-Assembly dient. Da fehlen die Constraints bei den U-Joints. Gruss, Beat Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
ShinAkuma
Mitglied
Student
Beiträge: 29
Registriert: 10.08.2007
|
erstellt am: 05. Sep. 2007 14:29 <-- editieren / zitieren --> Unities abgeben: Nur für Klaus Stutzmann
|

 Foren auf CAD.de
Foren auf CAD.de



 |
| 
 wozu doch so ein klo alles gut ist
wozu doch so ein klo alles gut ist 