| | |
 | KISTERS 3DViewStation: verbesserte Effizienz durch optimierte Bedienoberfläche, eine Pressemitteilung
|
|
Autor
|
Thema: Wagen auf Kurve (3789 mal gelesen)
|
cybexx
Mitglied
wiss. MA

   Beiträge: 36
Registriert: 06.05.2005
|

 erstellt am: 06. Mai. 2005 15:47
erstellt am: 06. Mai. 2005 15:47  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
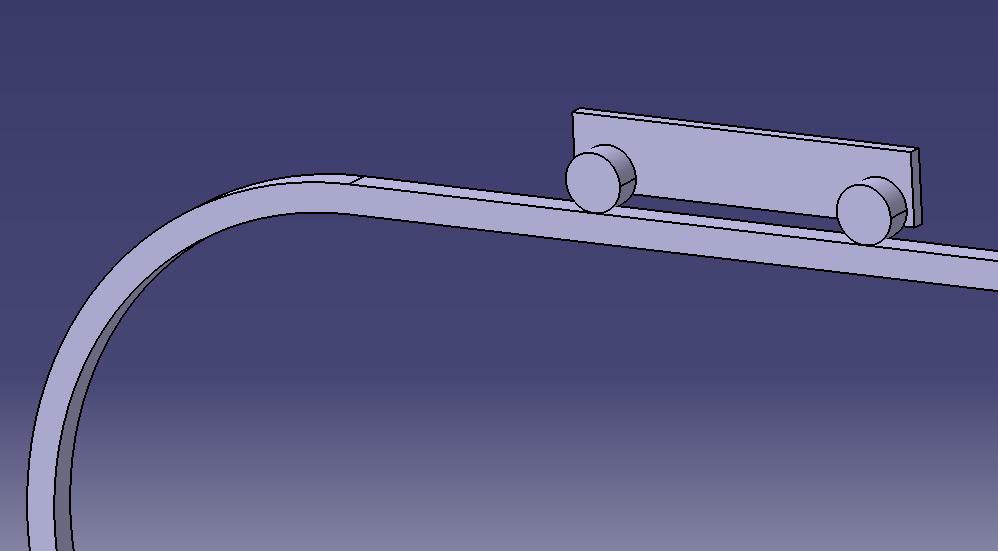
Hallo zusammen, ich bin gerade dabei mich mit der Kinematik abzuquälen. Leider habe ich weder im Forum noch im Netz eine Lösung gefunden, wahrschienlich ist sie zu einfach - und/oder ich zu doof. Mein Problem (abstrahiert): Anbei ein Bild eines sehr schematischen Wagens, der auf einer Bahn fahren soll. Die zwei symbolischen Räder können per Gleitkurvenverbinduch (3x) auf die Bahn "geheftet" werden, es bleibt nur noch ein freiheitsgrad. nun will ich dem Wagen eine Geschwindigkeit geben und diesen die Kurve entlang fahren lassen. Falls jetzt jemand antwortet "Die Kontur als Spline definieren" dleich die nächste Frage: (Wie) Kann ich eine Kontur in eine Spline umwandeln, an der ich dann den Verfahrweg entlanglaufen lassen kann. Letzte Frage: Sollte dann mal alles funktionieren, wie setze ich einen Sensor, der mir an einem beliebigen Punkt die Beschleunigung plottet? Allerbesten Dank schon mal!!!
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
catiaklaus
Mitglied
Dipl.-Ing. Maschinenbau
Beiträge: 139
Registriert: 18.03.2004
|
erstellt am: 06. Mai. 2005 20:23 <-- editieren / zitieren --> Unities abgeben: Nur für cybexx 
hi, die räder mit zeri Rollkurven Verbindungen an die Bahn legen, Vorteil: Eine der Verbindungen kann mit einem Befehl oder Gesetz (LAW) beaufschlagt werden. Die Räder an das Chassi mit Drehverbindungen heften. Das Chassi mit einer fiktiven Ebene durch eine Ebenen Verbindung an die Bahn heften. Jetzt sollte die "Kiste" laufen. Geschwindigkeit, schau mal im Forum unter "LAW definieren" im KIN Bereich nach, dass sollte helfen. Sensor: Punkt wählen Chassi, Referenz wählen (Bahn) und dann Sensoren aktivieren. Gruß
ck Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
cybexx
Mitglied
wiss. MA
Beiträge: 36
Registriert: 06.05.2005
|
 erstellt am: 09. Mai. 2005 11:56 <-- editieren / zitieren --> Unities abgeben:
erstellt am: 09. Mai. 2005 11:56 <-- editieren / zitieren --> Unities abgeben:
Hallo und Danke erst mal! Der Wagen rollt auf der Kurve - juhu. Es lag daran, dass die Räder ursprünglich nicht drehbar waren (Gleitkurve --> jetzt Rollkurve). Auch einen Sensor habe ich positioniert, der gibt mir bis jetzt nur die xyz nach Excel aus, aber das ist ja mal schon ein Anfang. Ich habe aber noch ein ziemliches Problem mit den Regeln (Law). Bei meiner Installation fehlt die Hilfefunktion (mein Admin sagt das kann er nicht ändern) und im Netz werden banale Dinge vorausgesetzt. Vielleicht könnte mir jemand noch ganz kurz folgende wohl seeehr einfache Dinge erklären:
- Wie erstelle ich eine Regel, bei der ich einem Part eine bestimmte Geschwindigkeit zuweise (wie ein Simulationsregler, nur halt mit m/s über eine bestimmte Zeit)
- Wie erstelle ich eine Regel mit Formel (ich hab' nirgendwo eine passende Schaltfläche o.ä. gefunden, die mich in einen Regeleditor bringen würde)
- Ich habe einen Sensor platziert (Punkt messen, Messung beibehalten, dann als Sensor aktiviert). Kann ich mir da ausser cen xyz nicht noch GEschwindigkeit und Beschleunigung ausgeben lassen? Oder muss ich das per Excel-Ausgabe mit nachgeschlalteter Formel machen? Allerbesten Dank! cybexx Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
cybexx
Mitglied
wiss. MA
Beiträge: 36
Registriert: 06.05.2005
|
erstellt am: 09. Mai. 2005 12:59 <-- editieren / zitieren --> Unities abgeben:
Nachtrag.... Oh Wunder, oh Wunder... wer auch immer dieses Menüdurcheinander programmiert hat gehört..(/%$/% Ergonomie ist leider ganz anders. Aber ich habe es geschafft eine Formel zu hinterlegen und nach vielen sinnlosen Klicks funktioniert jetzt auch die Ausgabe des Sensors. Bleibt die Frage: Geschwindigkeit und Beschleunigugn als direkte Ausgabewerte? Allerbesten Dank! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
corso
Mitglied
Dipl.-Ing. (FH)
Beiträge: 206
Registriert: 18.08.2004 R14 SP5 HF30
|
erstellt am: 09. Mai. 2005 16:25 <-- editieren / zitieren --> Unities abgeben: Nur für cybexx
Hallo! Für die Geschw.- & Beschl.messung gibts ein extra Feature unter Kinematik  . . Dazu vor der Simulation die Messung definieren (Messpunkt, Referenzelement) und dann mit Laws simulieren. Die entsprechenden Sensoren für Geschw. und Beschl. sind dann selektierbar. Gruss
Matthias Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
cybexx
Mitglied
wiss. MA
Beiträge: 36
Registriert: 06.05.2005
|
erstellt am: 10. Mai. 2005 10:34 <-- editieren / zitieren --> Unities abgeben:
Hallo nochmal, ich komme mir wirklich vor wie der letzte Depp. Also.. Simulation läuft, Danke an alle, Wagen fährt und auch sonst passt alles.
ABER ich kann zwar meine Messpunkte definieren (Assembly design -> Messen) nur kann ich keine Messoption finden, die mich ein Referenzelement definieren läßt um Geschwindigkeit und Beschleunigung zu erhalten... Ich habe alle Module durchsucht aber nix gescheites gefunden... Für einen Hinweis in welchem Modul ich diese Messfunktion mit Ferferenz finde wäre ich sehr dankbar....und evtl. gleich mal vorsichtshalber wie und wo ich dann die Geschwindigkeiten und Beschleunigungen bekomme, falls das nicht im Bereich des Sensorfensters der Simulation ist. DANKE! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
corso
Mitglied
Dipl.-Ing. (FH)
Beiträge: 206
Registriert: 18.08.2004 R14 SP5 HF30
|
erstellt am: 10. Mai. 2005 13:39 <-- editieren / zitieren --> Unities abgeben: Nur für cybexx
Hallo! Scheinbar habe ich mich in meinem letzten Beitrag nicht gut genug ausgedrückt, entschuldige. Für die Geschwindigkeitsmessung musst Du kein "Keep Measure" im Assembly Design oder sonstwo definieren. Das in meinem oberen Beitrag dargestellte Feature ist speziell für die Geschwindigkeits- und Beschleunigungsmessung da. Du findest es im Workbench "DMU Kinematics".
Du musst das Icon anklicken und im darauffolgenden Dialogfenster folgende Sachen eingeben:
- einen Punkt, an dem die Geschwindigkeit und Beschleunigung gemessen werden soll
- ein Referenzteil, zu dem die Geschw.&Beschl. relativ gemessen werden sollen
- den Mechanismus, welcher bei der Geschw.Messung simuliert werden soll (im Pulldownmenü werden die verfügbaren angezeigt)
- evtl. kann man noch einen Namen eingeben. Nach dem OK drücken wird das eben erzeugte Mess-Feature im Strukturbaum unter Applications/Mechanisms/<Mechan.name>/Speeds-Accelerations angezeigt. Wenn Du nun das nächste Mal eine Simulation mit Laws durchführst, sind die entsprechenden Sensoren in deiner Sensorenliste und du kannst sie für die Simulation überwachen lassen. Hoffe, dass jetzt alle Unklarheiten beseitigt sind. Gruss
Matthias Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
cybexx
Mitglied
wiss. MA
Beiträge: 36
Registriert: 06.05.2005
|
erstellt am: 10. Mai. 2005 15:22 <-- editieren / zitieren --> Unities abgeben:
Ich bin beeindruckt.... es funktioniert...alles. Es ist unglaublich schwer etwas ohne Hilfe-Datei zusammenzubauen, aber danke Eurer Hilfe... Ich hoffe ich darf bei Gelegenheit mal wieder ein triviales Problem äußern ohne verbannt zu werden. Schöne Grüße aus München Martin Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
corso
Mitglied
Dipl.-Ing. (FH)
Beiträge: 206
Registriert: 18.08.2004 R14 SP5 HF30
|
erstellt am: 10. Mai. 2005 15:40 <-- editieren / zitieren --> Unities abgeben: Nur für cybexx
|
cybexx
Mitglied
wiss. MA
Beiträge: 36
Registriert: 06.05.2005
|
erstellt am: 10. Mai. 2005 15:45 <-- editieren / zitieren --> Unities abgeben:
Super, Danke. Den zweiten kannte ich schon, aber der schwieg sich leider immer gerade dann aus, wenn's heiss wurde. Aber der erste ist genau das, was bei mir nicht funktioniert. Schönen Gruß Martin Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de
Foren auf CAD.de



 |
|