| | |
 | CATIA V5 Grundkurs | Einsteiger - 5 Std. 15 Min 48 |
| | |
 | Selektieren und Filtern in 3D-CAD-Baugruppen: Schnellere Übersicht und weniger Aufwand, eine Pressemitteilung
|
|
Autor
|
Thema: Probleme mit Erstellung eines Schneckengetriebes (4817 mal gelesen)
|
derkoelner
Mitglied
Konstrukteur

   Beiträge: 77
Registriert: 25.02.2003 CATIA V5 R16 SP5 HF46 auf IBM Thinkpad
|

 erstellt am: 19. Apr. 2005 09:16
erstellt am: 19. Apr. 2005 09:16  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
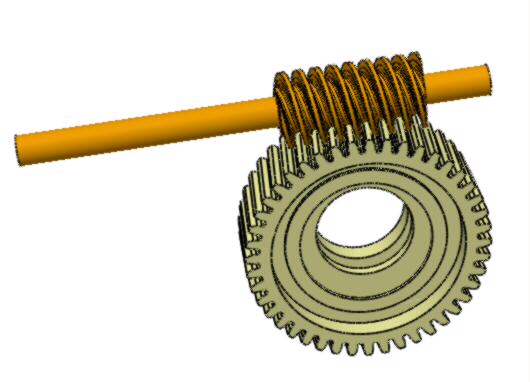
Hallo Gemeinde, wir haben Probleme mit der Erstellung eines Schneckengetriebes (siehe Bild). Uns fällt keine sinnvolle Möglichkeit ein mit den vorhandenen Verbindungstypen die zu diesem Problem passende Kinematik zu erstellen. - GEAR geht nicht, da die Achsen parallel zueinander ausgerichtet sein muessen.
- UNIVERSAL JOINT funktioniert nicht, da die Achsen sich nicht schneiden.... Hat jemand eine Idee??? Vielen Dank im Voraus, ------------------
 Der Kölner Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Catrin
Ehrenmitglied
Ingenieurin Maschinenbau/Informatik
Beiträge: 1929
Registriert: 12.12.2000
|
 erstellt am: 19. Apr. 2005 09:50 <-- editieren / zitieren --> Unities abgeben: Nur für derkoelner
erstellt am: 19. Apr. 2005 09:50 <-- editieren / zitieren --> Unities abgeben: Nur für derkoelner 
Du kannst Gear nehmen. Die Achsen muessen definitiv NICHT parallel sein !!! Habe es gerade ausprobiert.
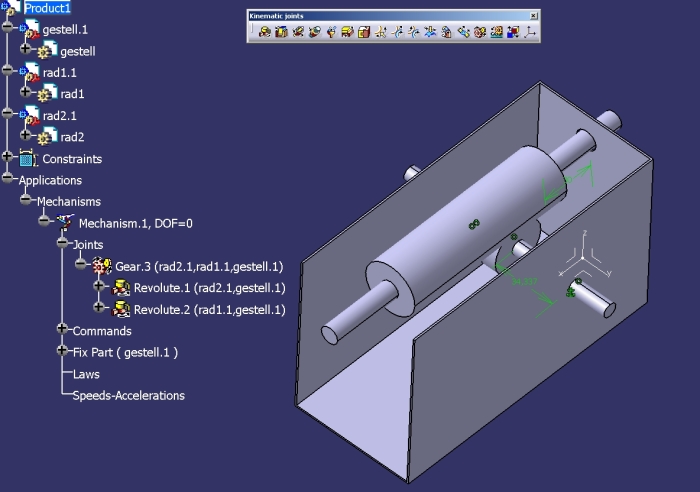
SChritt 1: Revolute 1 erstellen
Schritt 2: Revolute 2 erstellen
Schritt 3: Revolutre 1 und 2 bei der Erstellung von Gear angeben. Funzt.  Gruss
Catrin ------------------
CATIS GmbH 38444 Wolfsburg
catrin.eger@catis.de www.catis.de
 [Diese Nachricht wurde von Catrin am 19. Apr. 2005 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
corso
Mitglied
Dipl.-Ing. (FH)
Beiträge: 206
Registriert: 18.08.2004 R14 SP5 HF30
|
 erstellt am: 19. Apr. 2005 10:08 <-- editieren / zitieren --> Unities abgeben: Nur für derkoelner
erstellt am: 19. Apr. 2005 10:08 <-- editieren / zitieren --> Unities abgeben: Nur für derkoelner
Hallo! Ich stimme Catrin zu, "Gear" ist an dieser Stelle das richtige Gelenk. Vielleicht hast Du beim Erstellen des Joints den beliebten Fehler gemacht, dass Du für die beiden Drehgelenke nicht das selbe Part verwendet hast. Lies Dir dazu in der Online-Hilfe beim Gearjoint den Punkt 12 durch, da stehts erklärt.
Ich nehme eben an, dass dies zu Deiner Aussage geführt hat, dass der Gear-Joint in diesem Fall nicht verwendbar ist. Wenn nicht, dann nix für ungut  Gruss
Matthias Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
derkoelner
Mitglied
Konstrukteur
Beiträge: 77
Registriert: 25.02.2003
|
 erstellt am: 19. Apr. 2005 10:18 <-- editieren / zitieren --> Unities abgeben:
erstellt am: 19. Apr. 2005 10:18 <-- editieren / zitieren --> Unities abgeben:
Hallo Catrin, lange nichts voneinander gehoert.... Der Fehler ist gefunden:
Wir haben den Mechanismus so nicht definiert. Wir haben versucht zwei rotatorische Verbindungen zu verwenden und die mit den vorhandenen Verbindungen so zu vereinigen das der Mechanismus läuft. Wir wussten nicht, dass eine Gearverbindung in der Kombination so lauffähig ist. Vielen Dank! ------------------
Der Kölner Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Catrin
Ehrenmitglied
Ingenieurin Maschinenbau/Informatik
Beiträge: 1929
Registriert: 12.12.2000 HP ZBook 15
Windows 7 / V5R24
|
erstellt am: 19. Apr. 2005 10:23 <-- editieren / zitieren --> Unities abgeben: Nur für derkoelner
|

 Foren auf CAD.de
Foren auf CAD.de



 |
|