| | |
 | CATIA V5 Grundkurs | Einsteiger - 5 Std. 15 Min 48 |
| | |
 | Selektieren und Filtern in 3D-CAD-Baugruppen: Schnellere Übersicht und weniger Aufwand, eine Pressemitteilung
|
|
Autor
|
Thema: Problem mit Kinematikumgebung (2922 mal gelesen)
|
Tom i2
Mitglied
Konstrukteur

   Beiträge: 24
Registriert: 24.11.2004
|

 erstellt am: 24. Nov. 2004 17:13
erstellt am: 24. Nov. 2004 17:13  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Hallo Leute! Ich habe ein riesiges Problem mit der Kinematikumbegung, wir wollen einfach nicht miteinander.
Ich komme von der ProE-Seite und habe dort viel mit Bewegungssimulationen gearbeitet. Aber unter CATIA V5 R13 funktioniert meine Vorgehensweise nicht.
Ich muss eine Bewegungssimulation einer Vorderachse machen:
2 Antriebe (Lenkung, Radhub)
5 Bauteile (Lenkstange, Querlenker oben & unten, Radträger, Spurstange)
Um den Radträgerhub dierekt zu steuern habe ich ein Dummypart als Radhub eingebaut (Prismatic) und den Querlenker über seine Achse (Revolute) anbebunden.
Nun mein Problem:
Ich schaffe es nicht den Querlenkerendpunkt mit der Radhubebene (Dummypart) zu verbinden, damit beim Radhub der Querlenker mitgezogen wird.
Bekomme folgenden Error:
ErrorType = CATMathInputError
ErrorName = ColinearDirections
ErrorNumber = 131075 Nach meinen Überlegungen sollte das doch möglich sein Danke für eure Hilfe
------------------
the worlds fastest weasel, jr05 Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Tom i2
Mitglied
Konstrukteur
Beiträge: 24
Registriert: 24.11.2004
|
erstellt am: 24. Nov. 2004 17:29 <-- editieren / zitieren --> Unities abgeben:
|
catiaklaus
Mitglied
Dipl.-Ing. Maschinenbau
Beiträge: 139
Registriert: 18.03.2004
|
erstellt am: 25. Nov. 2004 14:33 <-- editieren / zitieren --> Unities abgeben: Nur für Tom i2 
hi, wäre nicht schlecht, wenn Du der Gemeinde mal ein Bildchen von der Baugruppe bereitstellst. Dann kann man Dir eventuell helfen, der Strukturbaum des Mechanismus sollt auch darauf zu sehen sein. Danke Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
kalanja
Mitglied
Entwicklungsing.
Beiträge: 1239
Registriert: 29.10.2001 Dell Precision M3800 Mobile Workstation
i7 2,2GHz - 16GB RAM
Nvidia Quadro K1100
Treiber: 353.62
Windows 10 Pro (x64)
V5 R21 x64 SP6
|
erstellt am: 25. Nov. 2004 15:55 <-- editieren / zitieren --> Unities abgeben: Nur für Tom i2
|
Tom i2
Mitglied
Konstrukteur
Beiträge: 24
Registriert: 24.11.2004
|
erstellt am: 25. Nov. 2004 16:14 <-- editieren / zitieren --> Unities abgeben:
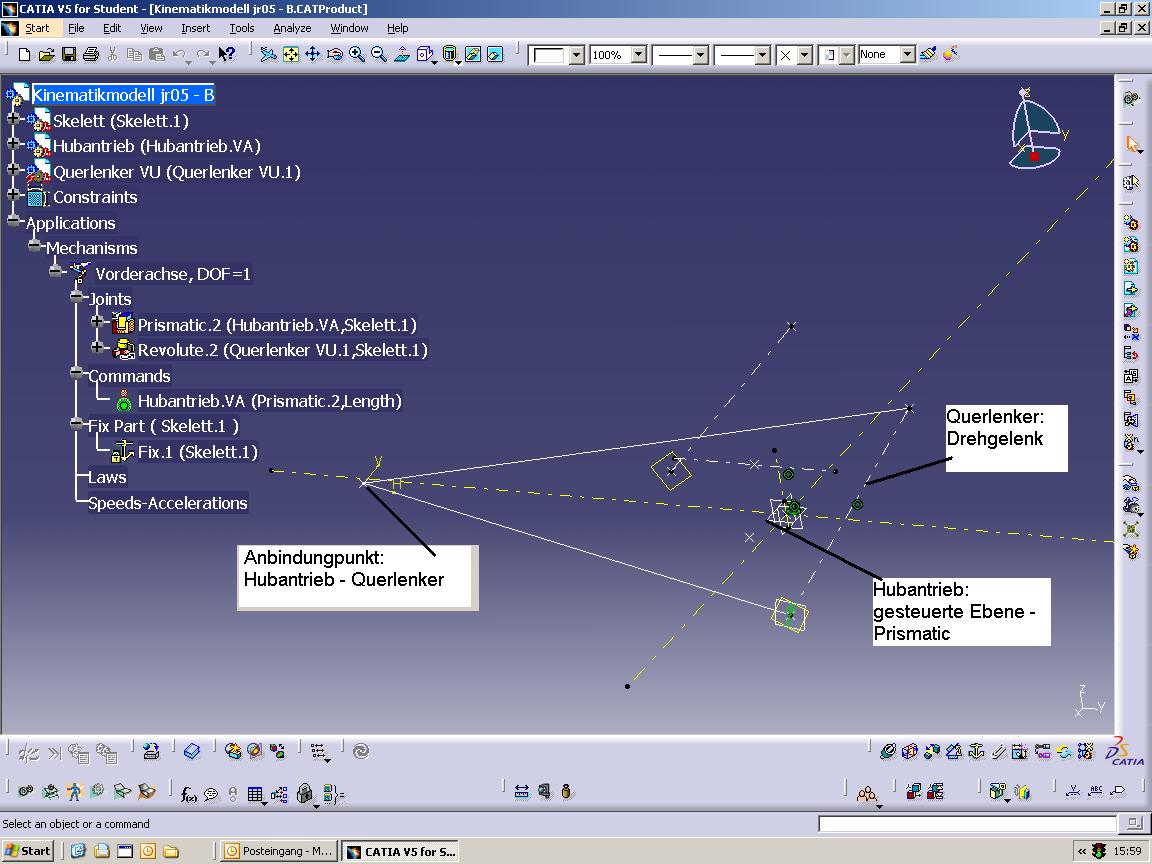
Hier ist ein Screenshot. Wie gesagt der Hubantrieb soll einfach den Querlenker mitziehen. Mit den Freiheitsgraden dürfte es da kein Problem geben. Hab vorher gelesen, dass es bei Punkt-Ebene Verbindungen öfters Probleme gibt wenn der Punkt nicht bereits in der Ebene liegt. Danke für Lösungsansätze ------------------
the worlds fastest weasel, jr05 Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
catiaklaus
Mitglied
Dipl.-Ing. Maschinenbau
Beiträge: 139
Registriert: 18.03.2004
|
erstellt am: 25. Nov. 2004 17:48 <-- editieren / zitieren --> Unities abgeben: Nur für Tom i2
hi, der untere Dreieckslenker macht alleine nur eine Drehbewegung, um eine gerade Führung des Rades zu erhalten benötigst Du den oberen Dreieckslenker, da er in Verbindung mit dem Radträger und dem Chassi ein Viergelenk Scharnier darstellt. Dann ist es möglich die gerade Einfederung des Rades abzubilden und als Steuerung für den Mechanismus den Federweg in einer Prismatischen Verbindung zu verwenden. Wenn ich Deinen Ansatz richtig deute, willst Du den Federweg mit der Prismatischen Verbindung und einer Punkt-Flächen-Verbindung in die Drehbewegung des Dreiecklenkers überführen. Zur Erzeugung einer Punkt-Flächen-Verbindung ist eine Fläche (keine Ebene aus dem Koordinatenkreuz) und ein Punkt, der auf dieser Fläche positioniert ist, notwendig. schönen Abend Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Tom i2
Mitglied
Konstrukteur
Beiträge: 24
Registriert: 24.11.2004
|
erstellt am: 25. Nov. 2004 18:00 <-- editieren / zitieren --> Unities abgeben:
Die Kinematik des Radhubes ist mir schon klar. Mein Problem ist es, dass der CATIA es nicht zulässt einen Punkt des Radträgers (oder einen anderen) mit dem Hubantrieb mit Punkt-Fläche zu zu verbinden. Bei einer Ebene bekomme ich oben genannten Fehler (Coliner Direction) und bei einer Fläche "Warning: Point is not on surface". Solange ich diese Punkt-Verbindung nicht hinbekomme kann icht überhaupt nichts animieren, da immer ein Freiheitsgrad übrigbleibt. ------------------
the worlds fastest weasel, jr05 Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
catiaklaus
Mitglied
Dipl.-Ing. Maschinenbau
Beiträge: 139
Registriert: 18.03.2004
|
erstellt am: 25. Nov. 2004 19:06 <-- editieren / zitieren --> Unities abgeben: Nur für Tom i2
hi, dann positioniere den Punkt auf der Fläche, oder erzeuge die Fläche um diesen Punkt, oder ist dies nicht möglich, dann sollte Dir CATIA einen Abstand zwischen Punkt und Fläche anzeigen. Die Fläche soll in dem Bauteil Hubantrieb sein. Erzeuge Dir dort eine Fläche über Line (aus Punkt (der aus dem Lenker) und Direction)und Translation. Dann befindet sich auch der Punkt aus dem Lenker auf der Fläche. Ansonsten erzeuge die eine Line und dann eine Punkt-Kurven-Verbindung. Da ist das Positionieren besser. CU Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Tom i2
Mitglied
Konstrukteur
Beiträge: 24
Registriert: 24.11.2004
|
 erstellt am: 04. Dez. 2004 23:22 <-- editieren / zitieren --> Unities abgeben:
erstellt am: 04. Dez. 2004 23:22 <-- editieren / zitieren --> Unities abgeben:
Hallo catiaklaus Danke für deine Hilfe, hab es geschafft mein Rad mach genau das, was es machen soll.
Habe nun die zweite Pubkt-Ebene Verbindung durch Punkt-Kurve ersetzt und es geht. mfg Tom i2 ------------------
the worlds fastest weasel, jr05 Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de
Foren auf CAD.de



 |
|