| | |
 | CATIA V5 Grundkurs | Einsteiger - 5 Std. 15 Min 48 |
| | |
 | Schnell, effizient und günstig: Mit der Kisters 3DViewStation 3D Arbeits- und Reparaturanleitungen einfach erstellen und pflegen, eine Pressemitteilung
|
|
Autor
|
Thema: Maschinensimulation mit Roboter (4432 mal gelesen)
|
pather231
Mitglied
   Beiträge: 3
Registriert: 09.12.2011 CATIA V5 R20
|

 erstellt am: 09. Dez. 2011 17:23
erstellt am: 09. Dez. 2011 17:23  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Hallo alle zusammen, ich muss in einer Studienarbeit einen Fräsroboter steuern. Die CAM-Bahn habe ich dazu schon ohne Roboter generiert.
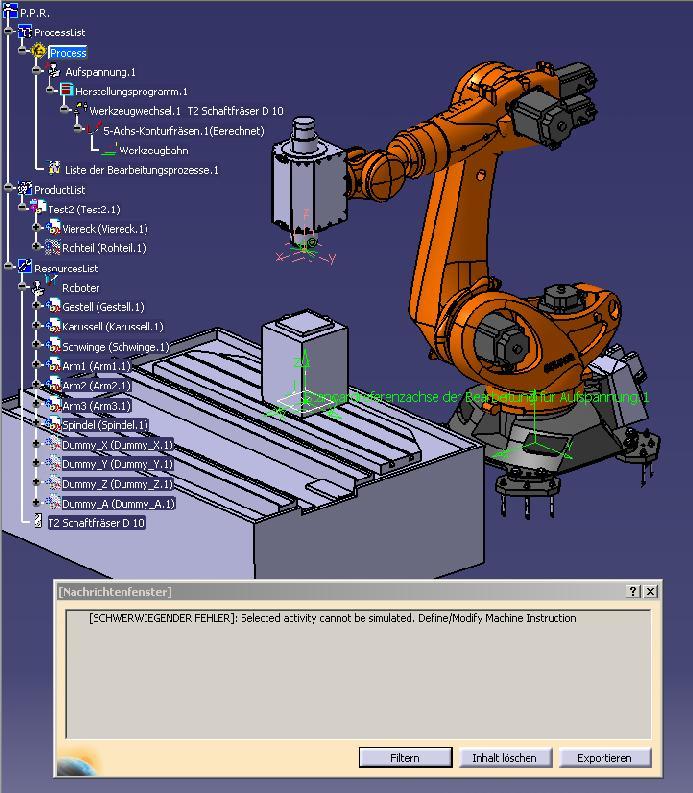
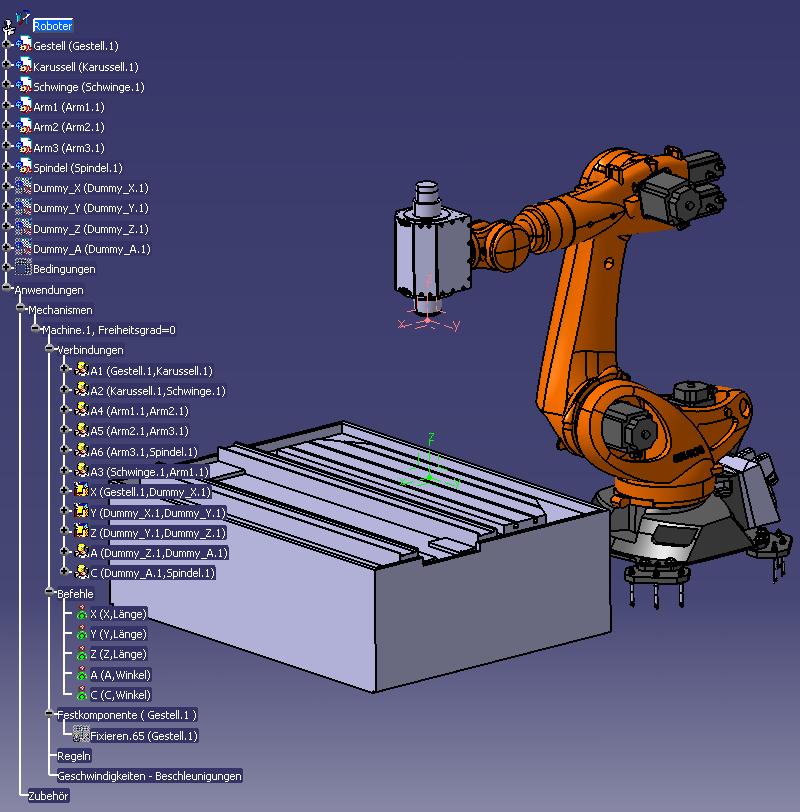
Jetzt wollte ich mit Hilfe der Maschinensimulation die Bahn abfahren lassen. Er meldet mir allerdings immer einen "Schwerwiegenden Fehler". (siehe Anhang) Die Kinematik habe ich mittels Dummy_Parts definiert. Dummy_X macht die X-Verschiebung bzgl. Feststehender Komponente; Dummy_Y die Y-Verschiebung bzgl. Dummy_X usw.. Die beiden rotatorischen FHG sind schlielich zw. Dummy_Z u. Dummy_A bzw. zw. Dummy_A und Fräser definiert. Am Fräser "hängt" nun über sechs rot. Verbindungen der Roboter. (siehe Anhang) Ich möchte jetzt eigentlich nur die "Maschine mit Werkzeugbahn simulieren" damit sozusagen der Fräser aus der "Werkzeugbahn wiedergeben"-Simulation an meinem Roboter rüttelt, aber es bewegt sich nichts. Ich möchte gar nicht über NC-Code gehen. Deshalb habe ich keine Einstellungen bezüglich PP etc. vorgenommen. (Mit PP und NC-Code simulieren hat sogar schon funktioniert, die Bewegungen waren aber falsch.) Ich habe leider keine Idee was ich falsch gemacht habe. Ist das generell überhaupt so vorstellbar? Viele Grüße,
Patrick Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
martin2
Mitglied
Konstrukteur

Beiträge: 1028
Registriert: 05.2002.27
|
 erstellt am: 09. Dez. 2011 21:34 <-- editieren / zitieren --> Unities abgeben: Nur für pather231
erstellt am: 09. Dez. 2011 21:34 <-- editieren / zitieren --> Unities abgeben: Nur für pather231 
Hallo, nur mal so nebenbei... Angenommen Du fährst von X0 Y0 Z0 auf X100 Y0 Z0 - also nur in X-Richtung.
Auf einer normalen Maschine wird dann auch nur der X-Schlitten bewegt. Bei Dir müssen sich jedoch mehrere Achsen gleichzeitig bewegen um die Verfahranweisung zu machen. Wie soll das CATIA wissen, welche Roboterachsen jetzt wie bewegt werden sollen? Ich glaube für sowas würde man einen zweiten Postprozessor benötigen, welcher das NC-Programm der Fräsmaschine in ein NC-Programm für den Roboter umwandelt. Evlt. lieg ich da spontan aber auch total falsch? MfG Martin
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
pather231
Mitglied
Beiträge: 3
Registriert: 09.12.2011 CATIA V5 R20
|
erstellt am: 10. Dez. 2011 17:24 <-- editieren / zitieren --> Unities abgeben:
Deshalb habe ich den Weg über die Dummy-Parts genommen. Wenn eine normale Maschine bei dieser Anweisung den X-Schlitten bewegt, dann soll sich bei mir ja das Dummy_X-Part bewegen. Die Roboterachsen hängen dann ja nur an den Dummy-Parts dran. Auch die Befehle (bei der kin-Definition) beziehen sich ja nur auf die Dummy-Parts. Hole ich die Dummy-Parts ins Show dann muss ich aber feststellen, dass sich selbst diese nicht bewegen. P.S. der richtige Roboter läuft schon. Ich habe die XYZ-Werte und den IJK-Vektor aus der APT-Datei die Catia erzeugen kann mittels Matlab in Robotersprache übersetzt. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
martin2
Mitglied
Konstrukteur
Beiträge: 1028
Registriert: 05.2002.27
|
erstellt am: 11. Dez. 2011 05:24 <-- editieren / zitieren --> Unities abgeben: Nur für pather231
Hallo nochmal, ok - soweit gecheckt. Ein weiterer Vorschlag: Versuch mal unter den Verbindungen alles bis auf X, Y, Z, A, und C rauszulöschen.
Bewegt sich dann das Dummyteil? Falls ja - evtl. den Roboter mittels "normalen Baugruppenbedingungen" an das Dummyteil heften. Besserung in Sicht? Sonstiges:
- Kannst Du die Maschine mit dem "Jog"-Befehl bewegen?
- Beim Erstellen einer Verbindung kann man auch immer checken ob die Verbindung simuliert werden kann. Kommt/Kam diese Info beim Erzeugen jeder Verbindung? Gruß
Martin Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
pather231
Mitglied
Beiträge: 3
Registriert: 09.12.2011 CATIA V5 R20
|
erstellt am: 15. Dez. 2011 16:08 <-- editieren / zitieren --> Unities abgeben:
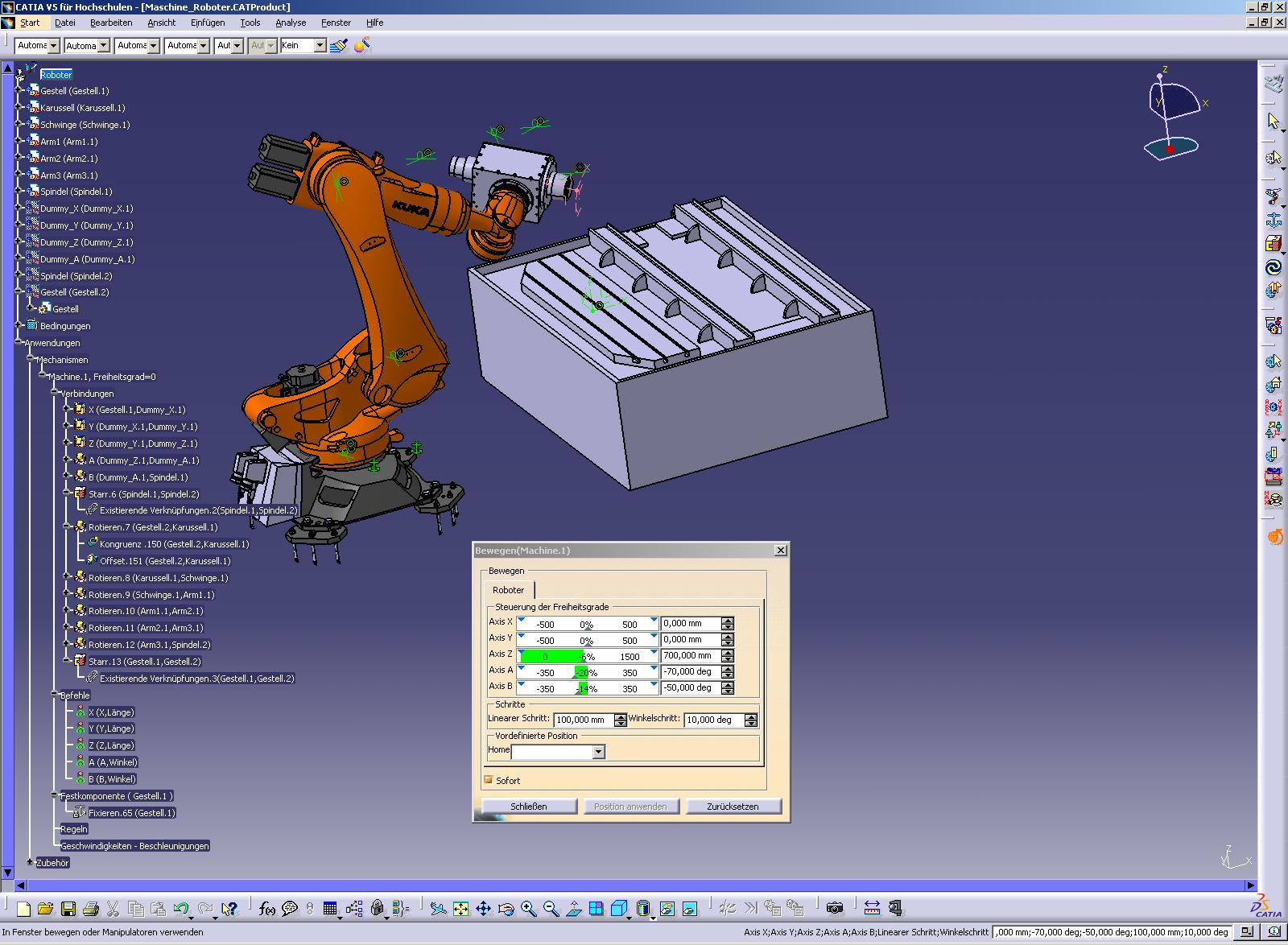
vielen dank für die tipps habe die bedingungen bis auf xyzac rausgelöscht. Dann hat die simulation mit den dummy parts funktioniert. Sprich die Spindel fährt allein die Bahn ab. Allerdings habe ich es nicht geschafft den roboter dranzuheften. Mit normalen Baugruppenbedingungen hat es nicht geklappt. Einen weiteren Mechanismus zu definieren hat auch nicht funktioniert. Das einzige was funktiniert ist eine Starre Verbindung zu andern Bauteilen. Die nimmt er dann bei der Simualtion starr mit. Daher habe ich mal das im Anhang probiert. Er bringt mir die Meldung "Mechanismus kann simuliert werden", ich kann es im JOG modus bewegen, aber bei der Simualtion tut sich gar nichts. Er fährt noch nicht mal ohne Roboter die Bahn ab. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de
Foren auf CAD.de



 |
|