| | |
 | Gut zu wissen: Hilfreiche Tipps und Tricks aus der Praxis prägnant, und auf den Punkt gebracht für CATIA & Co. |
| | |
 | Mit dem all4cad-Blog immer bestens informiert! - Neues zu Lösungen und Entwicklungen rund um ERP und PDM, eine Pressemitteilung
|
|
Autor
|
Thema: Kinematikanalyse eines Rosettenverschlusses (1257 / mal gelesen)
|
Matse.P
Mitglied
Selbstständiger

   Beiträge: 35
Registriert: 26.01.2009 IBM T530 Ivy-Bridge-Core-I7, 8GB Ram, Intel HD4000
Win10x64 Prof.
CATIA V5-6R2019
|

 erstellt am: 10. Mai. 2020 15:42
erstellt am: 10. Mai. 2020 15:42  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
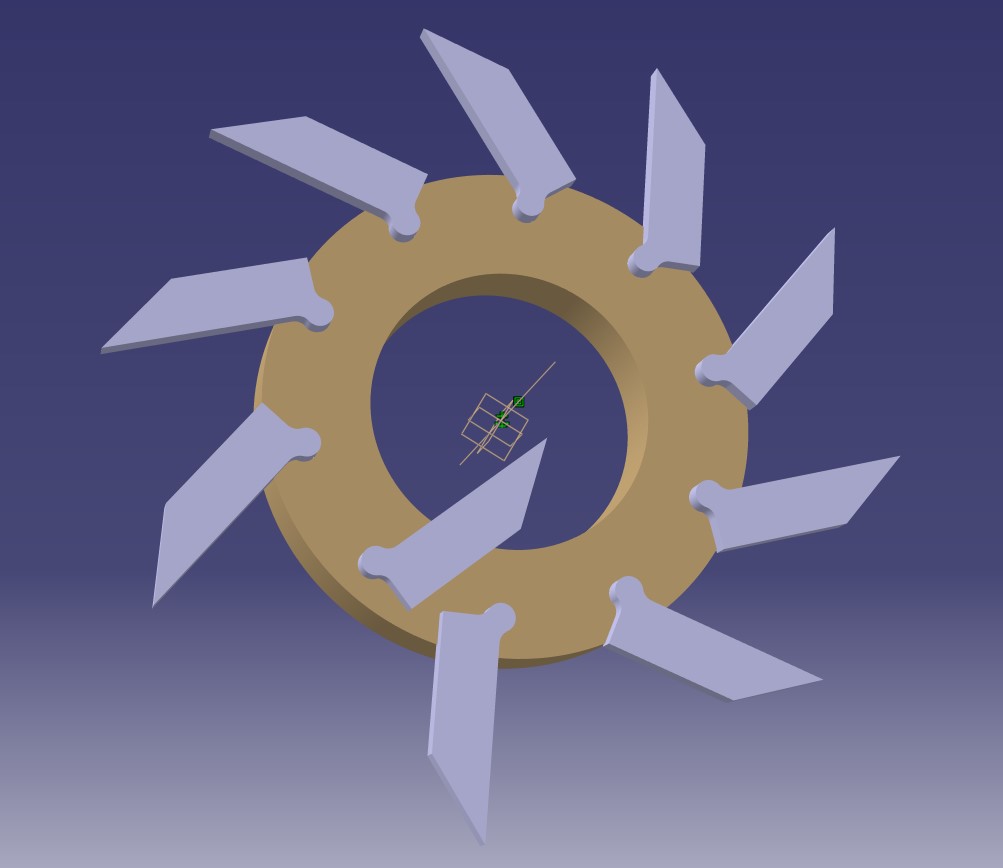
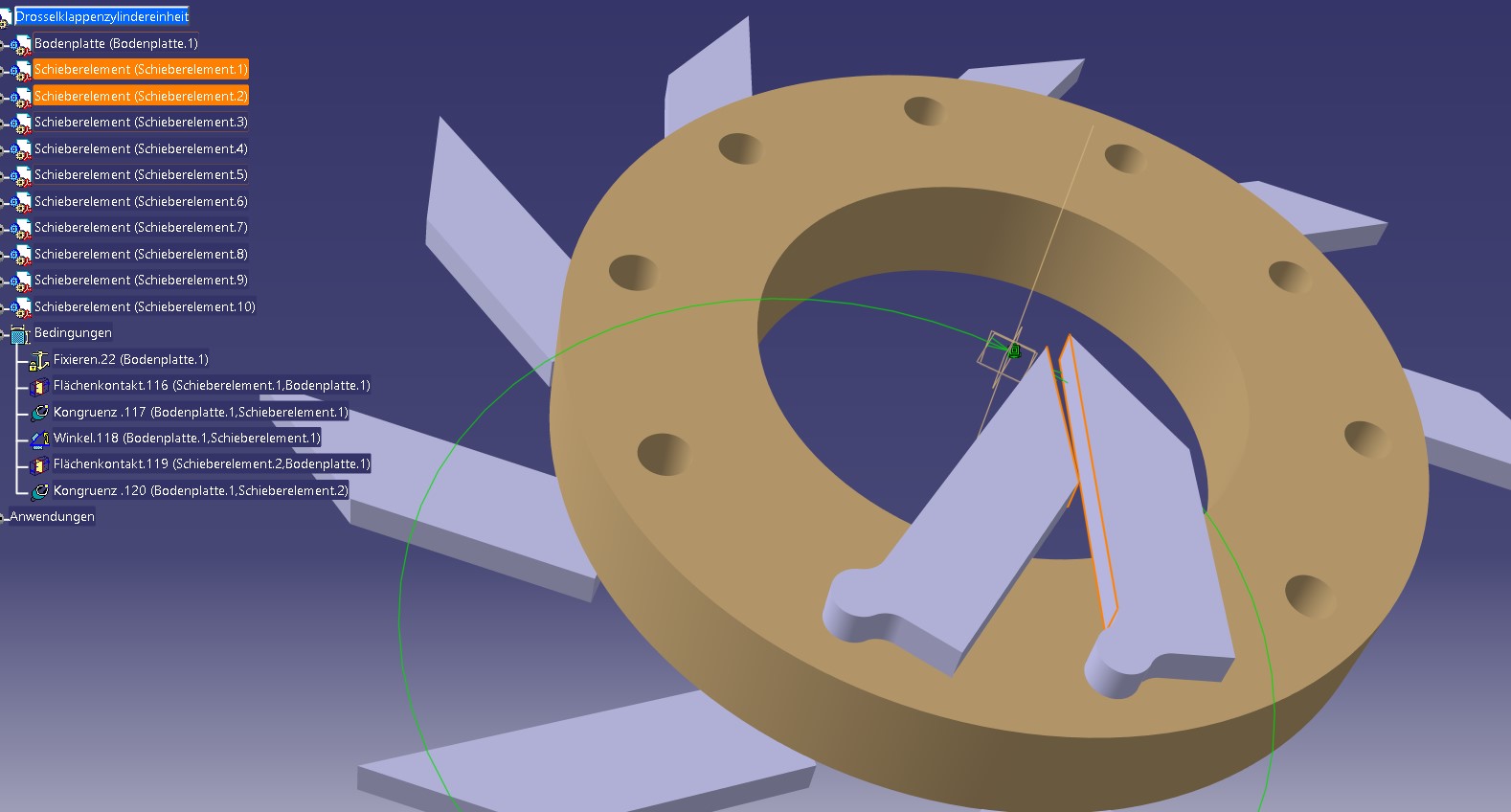
Hallo Leute, schaut Euch bitte mal das angehängte Bild eines Assembly an. Ich will einen Rosettenverschluss auslegen. Dazu sind um ein Loch herum 10 Verschlussblätter angeordnet, deren lange Seite genau durch die Zentren der Ansteckbolzenachsen gehen und deren Winkel der Spitze entsprechend 360/10=36° beträgt. Es soll hier nicht um die Frage gehen, wie breit die Rosettenelemente sein müssen und wie lang, um das Loch komplett abzudecken oder komplett freizugeben. Ich will lediglich das System kinematisch mit CATIA analysieren. Dazu folgende Bedingungen: 1. Achsen
Ich habe im Assembly Design die Achsen der kleinen Rosetten jeweils alle 10 mit Kongruenzbedingungen in die Achsen der Bohrungen auf der Grundplatte gesetzt. Das Ergebnis sieht man auf Bild 1. 2. Anlage der Rosetten auf der Grundplatte
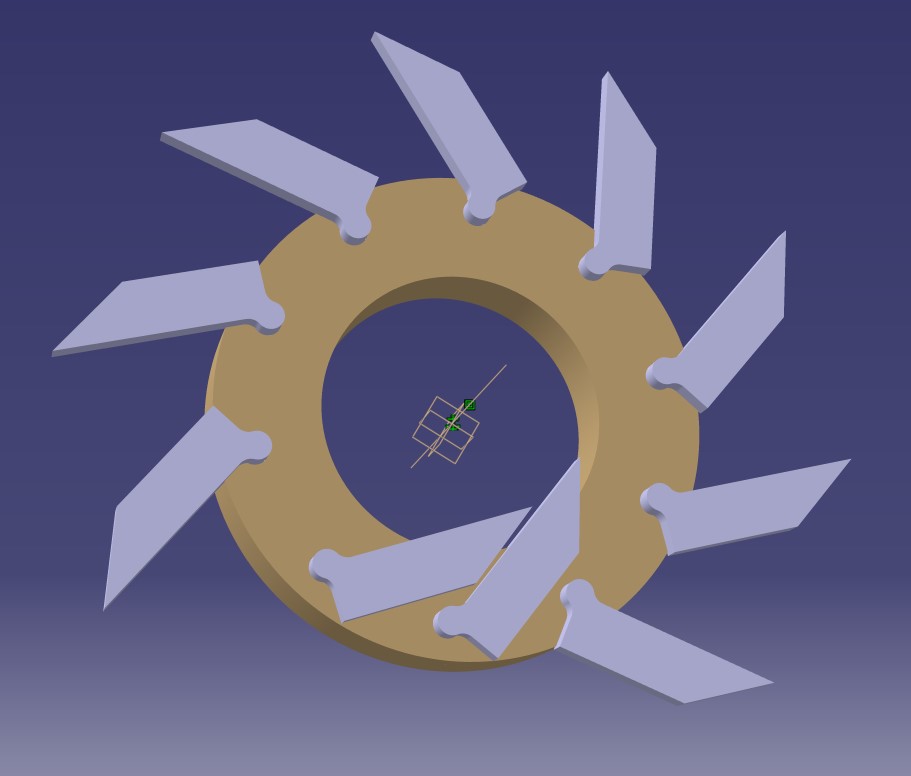
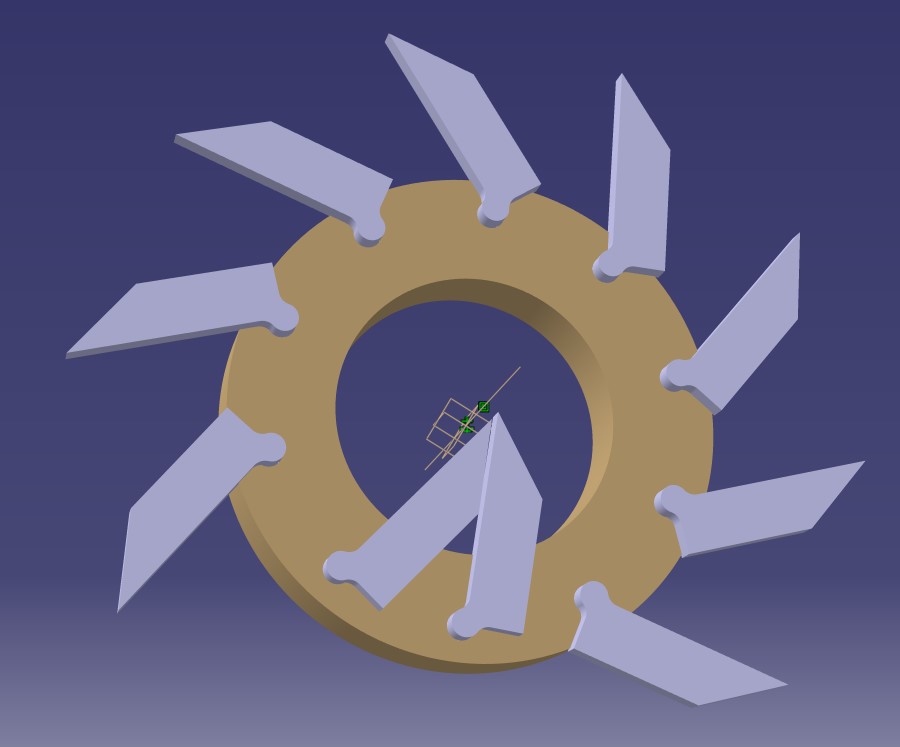
Ich habe 10 weitere Kontaktbedingungen jeweils jedes einzelnen Rosettenteils auf die Grundplatte gesetzt damit die Rosetten nicht "von ihr abheben" sondern ihre Position auf der Grundplatte damit fixiert ist. Nehme die die Funktion "Manipulation" und manipuliere dort abhängig der gesetzten Bedingungen, kann ich die Rosetten so drehen, bis sie sich zum Beispiel fast auf zu und fast auf Position offen befinden. Dies seht Ihr in den Bildern 2 und 3. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Matse.P
Mitglied
Selbstständiger
Beiträge: 35
Registriert: 26.01.2009 IBM T530 Ivy-Bridge-Core-I7, 8GB Ram, Intel HD4000
Win10x64 Prof.
CATIA V5-6R2019
|
erstellt am: 10. Mai. 2020 15:48 <-- editieren / zitieren --> Unities abgeben:
folgende Idee hatte ich nun: Ich wollte die Fläche an der Schräge der Rosette jeweils per Kontaktbedingung auf die lange Fläche der nächsten Rosette bedingen und dann einmal im Kreis herumwandern bis ich an der ersten Rosette wieder angekommen bin. Nur, sobald ich zwei benachbarte Rosetten per Kontaktbedinung aneinander hefte, kann ich sie nicht mehr mit dem "Manipulationswerkzeug" verdrehen. Eigentlich müsste dies aber noch möglich sein und zu den jeweiligen Öffnungsstellungen führen. Was mache ich falsch? Habt vielen Dank für alle Antworten,
Matse Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
bgrittmann
Moderator
Konstrukteur
    
Beiträge: 12179
Registriert: 30.11.2006 CATIA V5R19
|
erstellt am: 10. Mai. 2020 15:54 <-- editieren / zitieren --> Unities abgeben: Nur für Matse.P 
Servus Und wie lautet jetzt deine Frage?
Willst du es rein im AssemblyDesign analysieren oder auch im DMU Kinematik?
Rein im Assembly würde ich die "Klappen" noch über eine Winkelbedingung positionieren, jeweils eine Formel anlegen und über einen zentralen Parameter die Lage steuern/verändern Gruß
Bernd PS: ein Beispiel für einen alternativen Aufbau siehe hier ------------------
Warum einfach, wenn es auch kompliziert geht. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Matse.P
Mitglied
Selbstständiger
Beiträge: 35
Registriert: 26.01.2009 IBM T530 Ivy-Bridge-Core-I7, 8GB Ram, Intel HD4000
Win10x64 Prof.
CATIA V5-6R2019
|
erstellt am: 10. Mai. 2020 17:07 <-- editieren / zitieren --> Unities abgeben:
Hallo Bernd, kann man es schon rein im Assembly analysieren? Würde ich das dann durch "Manipulation" machen? Die Hoffnung war, eben nicht Bewegungsformeln zueinander angeben zu müssen sondern dies rein durch Kontaktbedinungen zu machen. Aber wahrscheinlich ist das zu simpel gedacht und geht nicht, oder? Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
bgrittmann
Moderator
Konstrukteur
Beiträge: 12179
Registriert: 30.11.2006 CATIA V5R19
|
erstellt am: 10. Mai. 2020 17:16 <-- editieren / zitieren --> Unities abgeben: Nur für Matse.P
Servus Wenn du eine Bedingung findest die beim Aufklappen immer noch passt.
Mit einer Kontaktverbindung zwischen ebenen Flächen wird es wohl nicht klappen (eventuell Offsetbedingnung zwischen Ebene und Linie). Gruß
Bernd
------------------
Warum einfach, wenn es auch kompliziert geht. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Matse.P
Mitglied
Selbstständiger
Beiträge: 35
Registriert: 26.01.2009 IBM T530 Ivy-Bridge-Core-I7, 8GB Ram, Intel HD4000
Win10x64 Prof.
CATIA V5-6R2019
|
erstellt am: 10. Mai. 2020 17:53 <-- editieren / zitieren --> Unities abgeben:
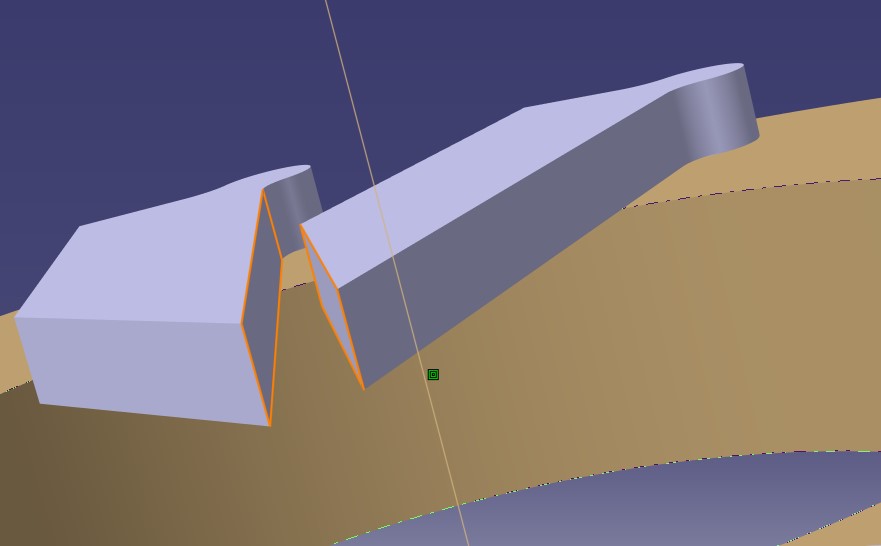
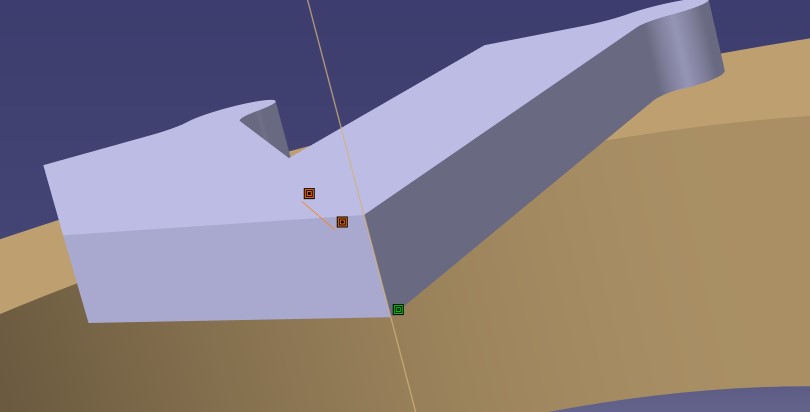
Hm, das habe ich probiert, leider erfolglos... Kannst Du Dir das hier angehängte Bild noch einmal ansehen? Also Rosette Nummer 1 hat jetzt einen definierten Winkel, eine Kongruenzbedingung zwischen Bolzen und Loch und eine Kontaktbedinung zwischen der Unterseite der Rosette und der Oberseite der Basisplatte. das funktioniert soweit. Nun baue ich die zweite Rosette dazu. Eine Kongruenz auf die nächste Bohrung, gleiche Kontaktbedinung zur Basisplatte, Ansicht aktualisiert und alles ist OK. Nun setze ich eine Kontaktbedingung der beschriebenen Flächen zwischen Rosette 1 und 2 und versuche, die Ansicht zu aktualisieren -> Fehler: System überbestimmt, Kontaktbedingung wird ignoriert. Dann setze ich eine Offsetbedingung von Rosette 1 Fläche zu Rosette 2 Kante unten auf der Gegenfläche, setze diesen auf 0 und versuche, die Ansicht zu akualisieren -> Fehler: System überbestimmt, Offsetbedingung wird ignoriert. Was kann ich nun tun? Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Matse.P
Mitglied
Selbstständiger
Beiträge: 35
Registriert: 26.01.2009 IBM T530 Ivy-Bridge-Core-I7, 8GB Ram, Intel HD4000
Win10x64 Prof.
CATIA V5-6R2019
|
 erstellt am: 10. Mai. 2020 18:13 <-- editieren / zitieren --> Unities abgeben:
erstellt am: 10. Mai. 2020 18:13 <-- editieren / zitieren --> Unities abgeben:
Oh Gott, der Thread kann geschlossen werden. Der Mechanismus ist so nicht möglich wie ich mir das dachte.  Die Flächen passen mit den geraden Lamellen so wirklich nur in der geschlossenen Position aufeinander. Sobald sich ein Glied dreht, passt der 36°-Anschlusswinkel zum nächsten nicht mehr, das werden dann immer etwas mehr... Ich werde meine Konstruktion noch einmal überdenken... Vielen Dank! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
bgrittmann
Moderator
Konstrukteur
Beiträge: 12179
Registriert: 30.11.2006 CATIA V5R19
|
erstellt am: 10. Mai. 2020 18:13 <-- editieren / zitieren --> Unities abgeben: Nur für Matse.P
Servus Das System ist über bestimmt, da der Flächenkontakt zwischen den Rosetten nur in einer Winkellage funktioniert.
Verwende statt der Kontaktverbindung mal eine Offset-Verbindung zwischen Spitze(Kante) der Rosette 1 und lange Seitenfläche der Rosette 2 Gruß
Bernd ------------------
Warum einfach, wenn es auch kompliziert geht. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de
Foren auf CAD.de



 |
|