Hallo allerseits,
ich stehe gerade vor der Herausforderung, einen Gelenkantrieb in Form eines Momentes mit einer Verbindung mit mehreren Rotationsfreiheiten zu verknüpfen.
Ich habe das Problem anhand eines einfachen Ersatzmodells nachmodelliert (siehe Bilder). Bitte habt Verständnis, dass ich hier im Forum kein Modell/Bilder des zu untersuchenden, im Unternehmen entwickelten Mechanismus hochladen kann.
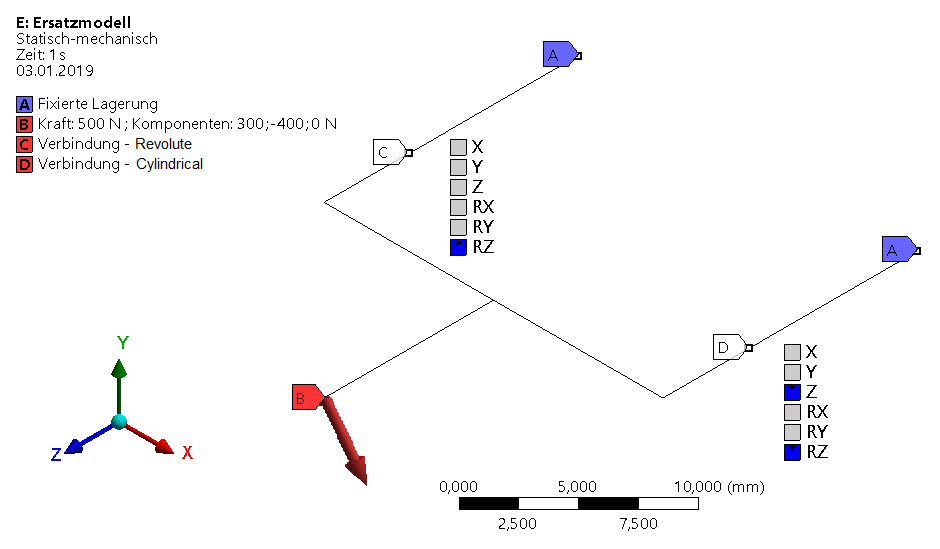
Ein mit einer diagonalen Kraft (in der xy-Ebene liegend, F = (300; -400; 0) [N]) belasteter Körper ist zweifach kugelgelagert (Drehgelenk/Revolute Joint, z-Rotationsfreiheit).
Um eine Überbestimmung in z-Kraftrichtung zu vermeiden, wird einem der beiden Lager zusätzlich ein translatorischer Freiheitsgrad entlang der z-Achse gegeben (Zylindergelenk/Cylinrical Joint). Da keine Kraft in z-Richtung eingeleitet wird, ist dies zulässig.
(siehe Abbildung 1)
Durch die beiden Kugellager ergibt sich eine Überbestimmung des Systems in den Momentengleichgewichten um die x- und y-Achse. Das zu übertragende Gesamtmoment ist dabei bekannt (-6 Nm um x, -5,5 Nm um y, um die Momentengleichgewichte zu erfüllen). Im einfachen Ersatzmodell (siehe Abbildungen) teilen sich die Momente symmetrisch (50/50 %) auf die beiden Lager auf, in der analysierten Mechanik sind Kraft- und Momentenfluss deutlich komplexer.
In bisherigen Untersuchungen wurde diese Überbestimmung immer durch eine Fallunterscheidung gelöst - entweder trägt Lager 1 das gesamte Moment, oder eben Lager 2 (das jeweils andere Lager wird zu einem Kugelgelenk). Meist allerdings lediglich mit dem Ziel, das Getriebe für kinematische Analysen umlauffähig zu bekommen. Und nicht, um wirklichkeitsgetreue Gelenkreaktionen zu erhalten. Dieses Vorgehen (Best und Worst Case Analyse) scheint für eine realitätsnahe Beurteilung der Bauteilfestigkeit wenig tauglich.
Deshalb war meine Überlegung, an diesem Getriebeglied über Gelenkantriebe das Moment in einem der Lager vorzugeben. Dazu muss in der Verbindung die Rotation um die jeweilige Momentenachse freigegeben werden, um das Moment später über die Randbedingung "Gelenkantrieb/Joint Load" vorgeben zu können.
Das Moment im anderen Gelenk ergibt sich dann aus der Differenz zum zu übertragenden Gesamtmoment. So könnte man die Verteilung der Momente auf die beiden Lager ähnlich einem Schieberegler von 0/100 über 30/70, 50/50, ... bis 100/0 % frei variieren.
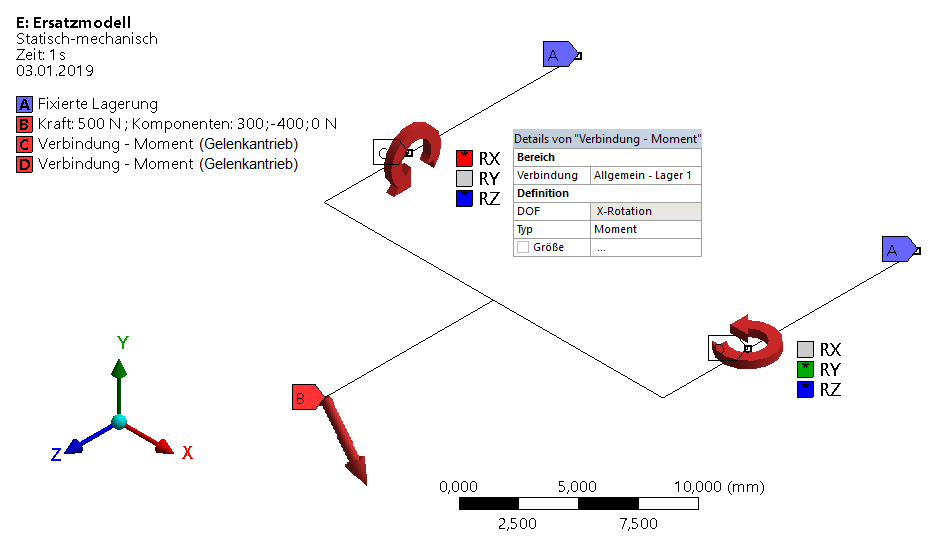
Oder eben, statt in einer Verbindung beide Momente vorzugeben, die x-Komponente des Moments in Lager 1 (C) und die y-Komponente in Lager 2 (D) vorzugeben (siehe Abbildung 2 (wie es in einer idealen Welt funktionieren sollte)).
Die Komponente im jeweils anderen Lager (Freiheit in der Verbindung gesperrt) ergibt sich dann widerum aus der Differenz zum Gesamtmoment (Momentengleichgewicht in der jeweiligen Achse).
Nun zum eigentlichen Problem:
Um die Momentenachsen für die Gelenkantriebe vorzugeben, nutze ich den Verbindungstyp "Allgemein/General" und schalte je zwei Rotationen frei (die Richtung des gewünschten Gelenkantriebs und die ohnehin freie z-Rotation (Kugellager)).
Allerdings funktioniert die Vorgabe eines Moments via Gelenkantrieb nur für Verbindungen mit einer freien Rotation.
Während man bei Kräften, unabhängig von der Anzahl an freien Verschiebungen, in mehreren Richtungen gleichzeitig Kräfte mittels Gelenkantrieb vorgeben kann, scheint das bei Momenten also nur für ein einzelnes, alleinstehendes freies Moment zu funktionieren.
(Randbemerkung: genau, wie in der "Allgemeinen Verbindung" alle Verschiebungen einzeln freigegeben werden können, die Freischaltung von zwei Rotationen/Sperrung einer einzelnen Rotation allerdings nur auf Umwegen (bspw. Kopplungsgleichung) möglich ist)
Zwar konnte ich über die Verteilung des x- und y-Momentes auf die Lager 1 und 2 (Randbedingungen C und D) die Anzahl der erforderlichen, freien Momente in der Verbindung von 3 auf jeweils 2 reduzieren. Allerdings ist ein Gelenkantrieb in Form eines Momentes damit noch immer nicht möglich, die zweite Rotationsfreiheit um die z-Achse aber unerlässlich.
Ich habe schon einige Zeit mit verschiedenen Konstellationen (unterschiedliche Verbindungstypen; Referenzkoordinatensystem der Verbindung in die "Hauptachse" des Gesamtmoments gedreht, um nur noch ein statt zwei vorzugebender Momente zu haben), Kopplungsgleichungen (um z-Rotation "wieder frei zu bekommen"), ... herumprobiert, leider ohne Erfolg.
Gibt es eine Möglichkeit, auch bei Verbindungen mit mehr als einer freien Rotation ein Moment via "Gelenkantrieb" vorzugeben?
Oder, wenn es nur auf diesem Weg funktionieren sollte, einen "Trick", um die in der Verbindung notwendigerweise gesperrte z-Rotation nachträglich wieder freizugeben?
Ich hoffe, ich konnte das Problem einigermaßen verständlich schildern und danke für jeden hilfreichen Hinweis!
Viele Grüße
Patrick
PS: verwendete ANSYS-Version: Workbench 19.1
[Diese Nachricht wurde von pneumane am 03. Jan. 2019 editiert.]
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP

 Foren auf CAD.de
Foren auf CAD.de



 |
|