| | |
 | Gut zu wissen: Hilfreiche Tipps und Tricks aus der Praxis prägnant, und auf den Punkt gebracht für NX |
|
Autor
|
Thema: NX Motion Simulation (1041 / mal gelesen)
|
patrick21
Mitglied

   Beiträge: 13
Registriert: 01.12.2015
|

 erstellt am: 15. Feb. 2016 12:47
erstellt am: 15. Feb. 2016 12:47  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
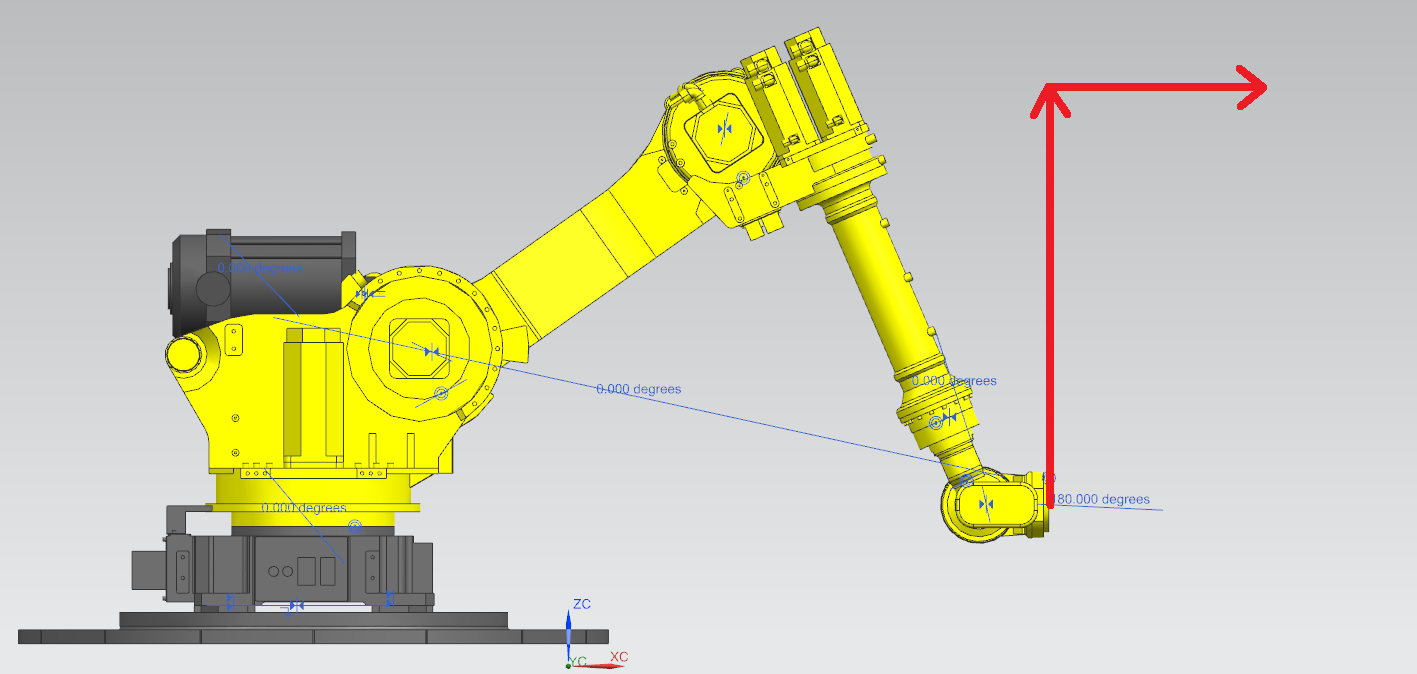
Hallo, ich möchte mit NX Motion Simulation die Bewegung eines Roboters simulieren. Problem dabei ist jedoch, dass ich mit meinen Kenntnissen lediglich den Winkel in einem Joint animieren kann, ich benötige jedoch eine lineare Bewegung des Flansches am Roboter. Welche Bewegungen die Arme des Roboters dabei machen, soll NX selbst entscheiden, ich möchte nur ein Maß in einer Richtung vorgeben. Im Idealfall sogar mithilfe eines Bewegungspfades. Eine Abbildung der geünschten Bewegung ist angehängt. Ist das so in Motion Simulation realisierbar? Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Rainer Schulze
Ehrenmitglied V.I.P. h.c.
Dipl.-Ing. im Ruhestand
Beiträge: 4419
Registriert: 24.09.2012 Teamcenter 8.1
TC_10.1 (Test)
NX 6.0.5.3 MP12
NX 9 (Test)
Catia V5R21
ANSYS
andere
|
erstellt am: 15. Feb. 2016 13:36 <-- editieren / zitieren --> Unities abgeben: Nur für patrick21 
>>Welche Bewegungen die Arme des Roboters dabei machen, soll NX selbst entscheiden, ich möchte nur ein Maß in einer Richtung vorgeben. Computer sind stur und dumm. Sie tun genau das, was ihnen der Anwender sagt.
"Selbst entscheiden" ist nicht drin.
Aber Dein Beispiel ist ein relativ einfaches geometrisches Problem.
Du hast zwar 3 Gelenke, aber die vertikale Bewegung betrifft nur die beiden langen Hebel.
Der kurze Hebel muss lediglich in der Horizontalen gehalten werden.
Also ergibt sich ein Dreieck, dessen linker Punkt fixiert ist, während der rechte Punkt eine Bewegung in der Z-Achse vollzieht.
(Der horizontale Abstand zwischen dem linken und dem rechten Gelenk ist konstant.)
Nimm t = 0 ... 100 als Zeitschritte.
Nimm dZ als 1/100 der vertikalen Strecke.
Nun kannst Du für jeden Zeitschritt die erforderlichen Winkel bestimmen.
Das müsste sich doch lösen lassen... ------------------
Rainer Schulze [Diese Nachricht wurde von Rainer Schulze am 15. Feb. 2016 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
patrick21
Mitglied
Beiträge: 13
Registriert: 01.12.2015
|
erstellt am: 15. Feb. 2016 15:23 <-- editieren / zitieren --> Unities abgeben:
Vielen Dank. Ein Problem habe ich jetzt noch. Wie bekomme ich denn dann diese Tabelle in NX rein? Im Function Manager gibt es zwar die Möglichkeit "Table" jedoch verstehe ich nicht, wie ich da etwas hineinlade. Oder muss ich das für alle drei Gelenke separat machen? Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

| | Konstrukteur für unsere Projektgruppe (m/w/d) | Die besten Köpfe für die unterschiedlichsten Aufgaben zu finden sowie Menschen und Technologien zu verbinden, und zwar täglich aufs Neue - dafür schätzen unsere Kunden FERCHAU. Unterstütze uns: Als Berufserfahrene:r unterstützt du deine Kolleg:innen mit deinem langjährigen Know-how und deiner Expertise.
Konstrukteur für unsere Projektgruppe (m/w/d)
Kiel
Diese Herausforderungen ... | | Anzeige ansehen | Konstruktion, Visualisierung |
|
Rainer Schulze
Ehrenmitglied V.I.P. h.c.
Dipl.-Ing. im Ruhestand
Beiträge: 4419
Registriert: 24.09.2012 Teamcenter 8.1
TC_10.1 (Test)
NX 6.0.5.3 MP12
NX 9 (Test)
Catia V5R21
ANSYS
andere
|
erstellt am: 15. Feb. 2016 15:52 <-- editieren / zitieren --> Unities abgeben: Nur für patrick21
>>Oder muss ich das für alle drei Gelenke separat machen? Für jeden Antrieb eine Tabelle. Aber Du darfst gerne prüfen, ob Du diese Bewegung auch als Funktion der Zeit definieren kannst. ------------------
Rainer Schulze Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de (alle Foren)
Foren auf CAD.de (alle Foren)



 |
|