| | |
 | Gut zu wissen: Hilfreiche Tipps und Tricks aus der Praxis prägnant, und auf den Punkt gebracht für Autodesk Produkte |
| | |
 | 2D- und 3D-Bauvisionen in der Revit Weiterbildung mit IHK-Zertifizierung , ein Kurs (bis zu 100% förderbar mit Bildungsgutschein)
|
|
Autor
|
Thema: Zykloidengetriebe. (3200 mal gelesen)
|
zeinerling
Mitglied
Maschinenbaukonstrukteur

   Beiträge: 313
Registriert: 14.06.2011
|

 erstellt am: 13. Sep. 2015 15:57
erstellt am: 13. Sep. 2015 15:57  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
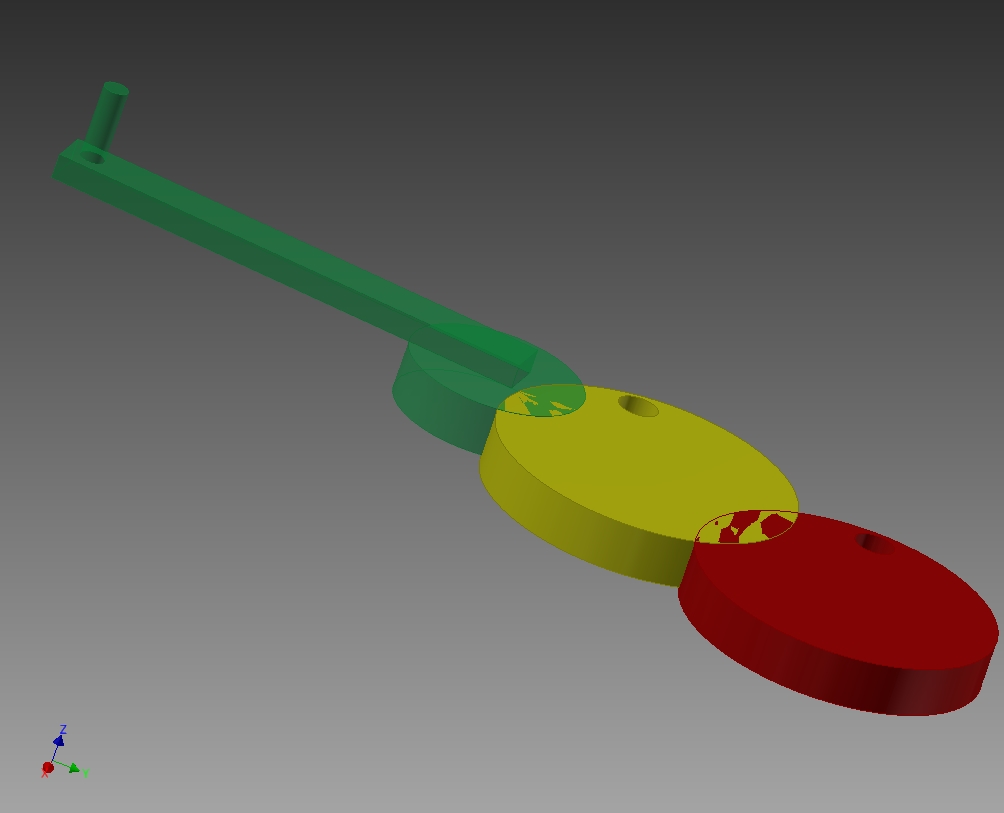
Hallo, die 3 Räder sollen Zahnräder sein. Zahnrad rot:
Teilkreis 50mm
Zähnezahl 10 Zahnrad gelb:
Teilkreis 50mm
Zähnezahl 10 Zahnrad grün mit Hebel:
Teilkreis 25mm
Zähnezahl 5 Achsabstand Zahnrad rot zu Zahnrad gelb:
50mm Achsabstand Zahnrad gelb zu Zahnrad grün mit Hebel:
37,5mm Achsabstand Zahnrad rot zu Zahnrad grün mit Hebel:
87,5mm Hebelverkröpfung Hebel grün:
87,5mm Zahnrad rot steht fest.
Zahnrad rot mit Zahnrad gelb drehen entgegengesetzt mit einem Übersetzungsverhältnis 1:1
Zahnrad gelb mit Zahnrad grün drehen entgegengesetzt mit einem Übersetzungsverhältnis 1:2 Der Antrieb erfolgt in dem das gelbe Zahnrad um die Achse von Zahnrad rot dreht.
Wenn das gelbe Zahnrad um das rote Zahnrad 0,5 Umdrehungen gedreht hat, macht der kleine Stift am grünen Hebel einen Linearhub von 350mm. Also das vierfache von der grünen Hebelverkröpfung. Ich schaffe es einfach nicht, dass das grüne Zahnrad mit dem gelben Zahnrad entgegengesetzt mit einem Übersetzungsverhältnis 1:2 dreht. Zum Ausrichten bitte die Abhängigkeiten wie aus der Anlage ersichtlich die Unterdrückung wieder ausschalten. Erstellt mit Inventor 2014. MfG. Zeinerling
[Diese Nachricht wurde von zeinerling am 13. Sep. 2015 editiert.]
[Diese Nachricht wurde von zeinerling am 13. Sep. 2015 editiert.] [Diese Nachricht wurde von zeinerling am 14. Sep. 2015 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Roland Schröder
Moderator
Dr.-Ing. Maschinenbau, Entwicklung & Konstruktion von Spezialmaschinen
    

Beiträge: 13760
Registriert: 02.04.2004 IV 2025.3.1
|
erstellt am: 13. Sep. 2015 17:38 <-- editieren / zitieren --> Unities abgeben: Nur für zeinerling 
Zitat:
Original erstellt von zeinerling:
Leider ist die Pack&Go-Datei zu groß.
Das liegt daran, dass Du 100MB Vorlagen/Templates  dazugepackt hast. Das schalte beim P&G besser aus. Die Abhängigkeiten Übergang und Drehung würde ich vermeiden; meiner Erfahrung nach erlebt man damit nur Ärger und Enttäuschung. Die gewünschten Drehbewegungen kannst Du hier auch (und viel stabiler) mit mehreren Abhängigkeiten Winkel mit parameterischer Verknüpfung erzeugen. Das Bewegen mit der Maus geht dann allerdings nicht mehr, und es ist auch in sich schon sehr anfällig. Stattdessen nutze besser Bewegen nach Abhängigkeit. Und im Übrigen versteht man unter einem Zykloidengetriebe im Allgemeinen etwas Anderes. Ich würde sagen, das ist ein Umlaufrädergetriebe zur Erzeugung einer Zykloide, und zwar der speziellen geraden Zykloide durch den Mittelpunkt. ------------------
Roland
www.Das-Entwicklungsbuero.de It's not the hammer - it's the way you hit! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
zeinerling
Mitglied
Maschinenbaukonstrukteur
Beiträge: 313
Registriert: 14.06.2011
|
erstellt am: 13. Sep. 2015 20:18 <-- editieren / zitieren --> Unities abgeben:
Zitat:
Original erstellt von Roland Schröder:
Das liegt daran, dass Du 100MB Vorlagen/Templates dazugepackt hast. Das schalte beim P&G besser aus.
Hallo Roland, die Templates lassen sich bei mir nicht abschalten, obwohl sie ausgeschaltet sind.
Inventor meint dann immer noch, das koplette Arbeitsverzeichnis mit in den Templateordner kopieren zu wollen.
Auch die IDW's werden als verknüpfte Datei nicht gefunden.
Es kann auch möglich sein, dass der Inventor bei mir nicht richtig funktioniert, oder ich bin zu blöd dazu. Das macht die P&G Datei so groß. Gibt es ein Tutorial für Dummis dafür? Denn durch die Onlinehilfe blicke ich nicht durch. MfG. Zeinerling [Diese Nachricht wurde von zeinerling am 13. Sep. 2015 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Steffen595
Mitglied
Konstrukteur
Beiträge: 1329
Registriert: 24.03.2004 IV2018 Professional SP1
Vault 2018
Inventor 2018 Professional
Windows 10 64bit
|
erstellt am: 14. Sep. 2015 02:07 <-- editieren / zitieren --> Unities abgeben: Nur für zeinerling
|
Roland Schröder
Moderator
Dr.-Ing. Maschinenbau, Entwicklung & Konstruktion von Spezialmaschinen
Beiträge: 13760
Registriert: 02.04.2004 IV 2025.3.1
|
erstellt am: 14. Sep. 2015 07:35 <-- editieren / zitieren --> Unities abgeben: Nur für zeinerling
Moin! Um die Baugruppe anzusehen, sind nur genau vier Dateien nötig: Die eine iam und die drei ipt. Dafür ist kein P&G nötig; das kann man auch einfach so in ein zip tun. Um Dein Animationsproblem zu lösen, vernachlässige zuerst mal den Zahneingriff und versuche nur, die beiden losen Räder auf ihrer Kreisbahn um das feste Rad zu bewegen. Dafür wäre es gut, auch einen Steg mit Lagerbohrungen (noch ein ipt  zu modellieren, wie er ja auch in der Realität nötig wäre. zu modellieren, wie er ja auch in der Realität nötig wäre. Benutze dann "Bewegen nach Abhängigkeit", damit kann man die Winkelbewegungen besser kontrollieren. ------------------
Roland
www.Das-Entwicklungsbuero.de It's not the hammer - it's the way you hit! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
zeinerling
Mitglied
Maschinenbaukonstrukteur
Beiträge: 313
Registriert: 14.06.2011
|
erstellt am: 14. Sep. 2015 12:33 <-- editieren / zitieren --> Unities abgeben:
Zitat:
Original erstellt von Roland Schröder:Um Dein Animationsproblem zu lösen, vernachlässige zuerst mal den Zahneingriff und versuche nur, die beiden losen Räder auf ihrer Kreisbahn um das feste Rad zu bewegen. Dafür wäre es gut, auch einen Steg mit Lagerbohrungen (noch ein ipt zu modellieren, wie er ja auch in der Realität nötig wäre. Benutze dann "Bewegen nach Abhängigkeit", damit kann man die Winkelbewegungen besser kontrollieren. [/B]
Hallo Roland, den Steg habe ich drin. Jede einzelne Abhängigkeit funktioniert 1a. Wenn ich jedoch versuche alle 3 Abhängigkeiten zugleich laufen lassen möchte, macht Inventor nicht mehr mit.
Ich vermute mal, dass Inventor schlicht zu doof dazu ist. Bei Bedarf kann ich die neuen Daten hier online stellen. MfG. Zeinerling Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Roland Schröder
Moderator
Dr.-Ing. Maschinenbau, Entwicklung & Konstruktion von Spezialmaschinen
Beiträge: 13760
Registriert: 02.04.2004 IV 2025.3.1
|
erstellt am: 14. Sep. 2015 12:54 <-- editieren / zitieren --> Unities abgeben: Nur für zeinerling
|
nightsta1k3r
Ehrenmitglied V.I.P. h.c.
retired ...

Beiträge: 11564
Registriert: 25.02.2004 Hier könnte ihre Werbung stehen!
|
 erstellt am: 14. Sep. 2015 12:56 <-- editieren / zitieren --> Unities abgeben: Nur für zeinerling
erstellt am: 14. Sep. 2015 12:56 <-- editieren / zitieren --> Unities abgeben: Nur für zeinerling
|
zeinerling
Mitglied
Maschinenbaukonstrukteur
Beiträge: 313
Registriert: 14.06.2011
|
erstellt am: 14. Sep. 2015 13:09 <-- editieren / zitieren --> Unities abgeben:
Zitat:
Original erstellt von nightsta1k3r:
Stelle bitte die 4 erforderlichen Dateien, wie von Roland schon angemerkt, in einem Zip bitte rein, wir vermuten daß nicht Inventor zu doof ist, ...
Hallo, anbei die gefordeten Daten. MfG. Zeinerling
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
nightsta1k3r
Ehrenmitglied V.I.P. h.c.
retired ...
Beiträge: 11564
Registriert: 25.02.2004 Hier könnte ihre Werbung stehen!
|
erstellt am: 14. Sep. 2015 14:10 <-- editieren / zitieren --> Unities abgeben: Nur für zeinerling
|
zeinerling
Mitglied
Maschinenbaukonstrukteur
Beiträge: 313
Registriert: 14.06.2011
|
erstellt am: 14. Sep. 2015 14:37 <-- editieren / zitieren --> Unities abgeben:
Zitat:
Original erstellt von nightsta1k3r:
Packe diese iam zu deinen Zahnrädern dazu ...
(die hast du ja schon)
Hallo, danke!!! Aber es funktioniert nicht, weil das gelbe Rad mit dem roten Rad nicht 1:1 gegenläufig dreht.
Denn wenn der graue Hebel 1/2 Umdrehungen macht, muss der Linearhub 4 Mal so groß sein wie die grüne Hebelverkröpfung.
So weit war ich auch schon. Sobald ich die Drehung hinzufüge, funktioniert nichts mehr  MfG. Zeinerling
[Diese Nachricht wurde von zeinerling am 14. Sep. 2015 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
nightsta1k3r
Ehrenmitglied V.I.P. h.c.
retired ...
Beiträge: 11564
Registriert: 25.02.2004 Hier könnte ihre Werbung stehen!
|
erstellt am: 14. Sep. 2015 14:49 <-- editieren / zitieren --> Unities abgeben: Nur für zeinerling
Du hattest das rote fixiert, darum lasse ich das gelbe kämmen wenn der graue Hebel unten bewegt wird, da hattest du ja de Winkelabhängigkeit zum Bewegen drin. Beschreib halt noch mal für alle verständlich was sich jetzt wo bewegen soll.
Die Angle3 ist nur zum Ausrichten wenn es sich verdreht hat, du kannst aber die "Bewegung" unterdrücken und bei den Winkelabhängigkeiten das Vorzeichen ändern, dann drehen sie andersrum. BTW: Schweißbaugruppe ist für sowas suboptimal, darum habe ich neu zusammengebaut. ------------------
MGOC [Diese Nachricht wurde von nightsta1k3r am 14. Sep. 2015 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
zeinerling
Mitglied
Maschinenbaukonstrukteur
Beiträge: 313
Registriert: 14.06.2011
|
erstellt am: 14. Sep. 2015 17:11 <-- editieren / zitieren --> Unities abgeben:
Zitat:
Original erstellt von nightsta1k3r:
Du hattest das rote fixiert, darum lasse ich das gelbe kämmen wenn der graue Hebel unten bewegt wird, da hattest du ja de Winkelabhängigkeit zum Bewegen drin. Beschreib halt noch mal für alle verständlich was sich jetzt wo bewegen soll.
Die Angle3 ist nur zum Ausrichten wenn es sich verdreht hat, du kannst aber die "Bewegung" unterdrücken und bei den Winkelabhängigkeiten das Vorzeichen ändern, dann drehen sie andersrum. BTW") : Schweißbaugruppe ist für sowas suboptimal, darum habe ich neu zusammengebaut. : Schweißbaugruppe ist für sowas suboptimal, darum habe ich neu zusammengebaut.
Hallo, Danke!!! Aber es funktioniert nicht, weil das gelbe Rad mit dem roten Rad nicht 1:1 gegenläufig dreht.
Denn wenn der graue Hebel 1/2 Umdrehungen macht, muss der grüne Linearhub von dem kleinen Stift 4 Mal so groß sein wie die Hebelverkröpfung.
So weit war ich auch schon. Sobald ich die Drehung hinzufüge, funktioniert nichts mehr.
Wie das Teil in sämtlichen Einzelheiten funktioniert, steht im Eingangsthread.
Das Teil ist schon mehrmals in Stahl und Eisen gebaut worden. Und es funktioniert! MfG. Zeinerling
[Diese Nachricht wurde von zeinerling am 14. Sep. 2015 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
rode.damode
Mitglied
Maschinenbauingenieur
Beiträge: 658
Registriert: 15.07.2011 Inventor 2026
ZBook15, i7
Quadro M2200
32GB
|
erstellt am: 14. Sep. 2015 17:35 <-- editieren / zitieren --> Unities abgeben: Nur für zeinerling
Auch Hallo Natürlich dreht sich das gelbe Rad durch die Umdrehung um das Rote 2x herum. Dies ist aber von nightsta1k3r in den Winkelabhängigkeiten berücksichtigt worden. Was nicht paßt ist die Abängigkeit Drehung1. Diese brauchst Du nur auf 0.5 setzen, dann funktioniert es. Viele Grüße
Roger
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Roland Schröder
Moderator
Dr.-Ing. Maschinenbau, Entwicklung & Konstruktion von Spezialmaschinen
Beiträge: 13760
Registriert: 02.04.2004 IV 2025.3.1
|
 erstellt am: 14. Sep. 2015 17:46 <-- editieren / zitieren --> Unities abgeben: Nur für zeinerling
erstellt am: 14. Sep. 2015 17:46 <-- editieren / zitieren --> Unities abgeben: Nur für zeinerling
Zitat:
Original erstellt von Roland Schröder:
Die Abhängigkeiten Übergang und Drehung würde ich vermeiden; meiner Erfahrung nach erlebt man damit nur Ärger und Enttäuschung.
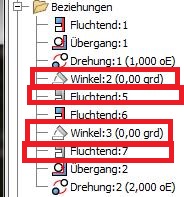
Wie oft soll ich das noch schreiben?  Ich empfehle:
- Setze ausschließlich Winkelabhängigkeiten zum Ursprung der Baugruppe (1. Bild)
- Bewege eine davon mit Bewegen nach Abhängigkeit
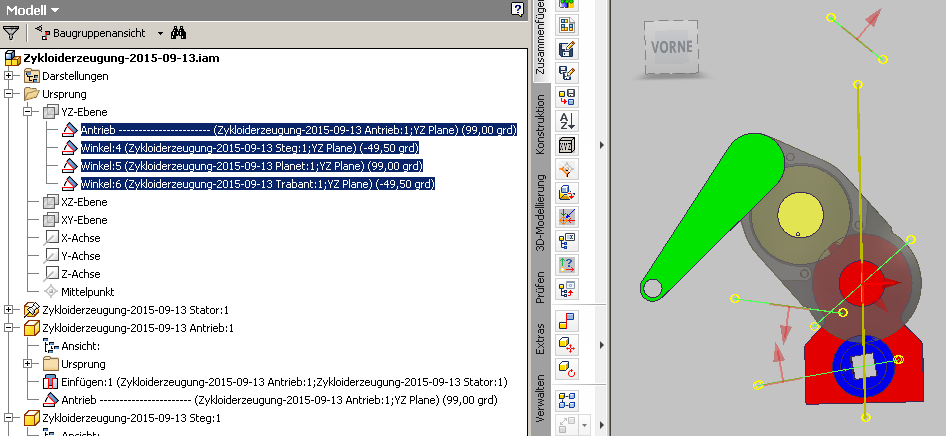
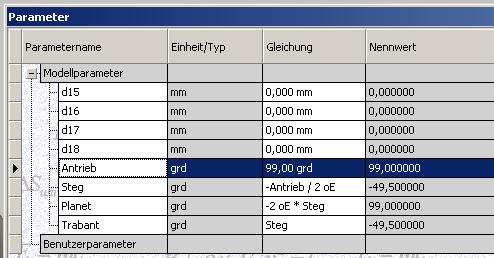
- Mache die anderen Winkelabhängigkeiten per Formel in der Parameterliste davon mathematisch abbhängig (2. Bild) Das rote, stillstehende Zahnrad heißt bei mir Stator und ist fixiert, weil es stillsteht.
Das gelbe umlaufende Zahrad heißt bei mir Planet (ist so üblich bei Umlaufrädergetrieben).
Das grüne Zahnrad mit dem Hebel heißt bei mir Trabant (Trabanten laufen um Planeten).
Ich habe die Parameter der Winkelabhängigkeiten genauso benannt wie die jeweils dadurch bewegten Bauteile. ------------------
Roland
www.Das-Entwicklungsbuero.de It's not the hammer - it's the way you hit! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
zeinerling
Mitglied
Maschinenbaukonstrukteur
Beiträge: 313
Registriert: 14.06.2011
|
erstellt am: 14. Sep. 2015 18:04 <-- editieren / zitieren --> Unities abgeben:
|
Roland Schröder
Moderator
Dr.-Ing. Maschinenbau, Entwicklung & Konstruktion von Spezialmaschinen
Beiträge: 13760
Registriert: 02.04.2004 IV 2025.3.1
|
erstellt am: 14. Sep. 2015 22:55 <-- editieren / zitieren --> Unities abgeben: Nur für zeinerling
|
rode.damode
Mitglied
Maschinenbauingenieur
Beiträge: 658
Registriert: 15.07.2011 Inventor 2026
ZBook15, i7
Quadro M2200
32GB
|
erstellt am: 17. Sep. 2015 11:03 <-- editieren / zitieren --> Unities abgeben: Nur für zeinerling
Hallo Roland Ich denke, daß er meinen Tip in der Baugruppe von nightsta1k3r umgesetzt hat. Das Problem an der ganzen Konstruktion ist aber, daß nicht das Übersetzungsverhältnis von gelben zu grünen Zahnrad entscheidend ist. Das gelbe Zahnrad dient nur der Richtungsumkehr und kann in jeder beliebigen Größe erstellt werden, ohne daß sich an der linearen Bewegung des grünen Bolzens etwas ändert. Vorausgesetzt natürlich, daß die Länge des Hebels angepaßt wird. Entscheidend für die lineare Bewegung ist nur das Übersetzungsverhältnis vom roten zum grünen Zahnrad! Jetzt wäre es schön, wenn man einfach dieses Verhältnis einsetzt und man die richtige Bewegung erhält. Aber so einfach ist es nicht. Bei der Lösung von nightsta1k3r wurden Winkelabhängigkeiten und Übersetzungsverhältnisse gemischt.
Wenn das gelbe Zahnrad geändert wird, so muß man das Übersetzungsverhältnis anpassen. Gleichzeitig aber auch die Formel für die Winkelstellung des gelben Zahnrades. Bei Deiner vorgeschlagenen Lösung, die mir persönlich lieber ist, muß man sich auch Gedanken machen, in welchen Verhältnissen die Winkel zueinander stehen. Jetzt gibt es in Invetor schon mal die schöne Abhängigkeit "Drehung", aber in diesem Fall kann man sie nicht richtig benutzten.(Ich lasse mich natürlich immer auch vom Gegenteil überzeugen) Das Problem ist, daß das rote Zahnrad still steht und das Gelbe beim Umlauf so keine Rotation erfährt, egal welches Übersetzungsverhältnis man eingibt. Ohne Winkelabhängigkeiten geht meiner Ansicht nach hier gar nichts. Und auch nichts ohne etwas Gehirnschmalz.
Aber das gehört eben zu einer richtigen Konstruktion dazu.
Auch wenn langsam immer mehr der Meinung sind, die Programme müßten doch alles können.
Daß sich das rote Zahnrad nun mal nicht dreht, dafür kann Inventor einfach nichts dafür. Viele Grüße
Roger
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de
Foren auf CAD.de



 |
|