| | |
 | Gut zu wissen: Hilfreiche Tipps und Tricks aus der Praxis prägnant, und auf den Punkt gebracht für Autodesk Produkte |
| | |
 | Wie treibt das ZW3D CAD-Modul innovatives Produktdesign voran |
|
Autor
|
Thema: Roboter bewegen (7177 mal gelesen)
|
Vollmer
Mitglied
Konstrukteur

   Beiträge: 149
Registriert: 12.06.2002 Inventor9 SP4 ; Compass4.2
|

 erstellt am: 28. Jul. 2006 08:48
erstellt am: 28. Jul. 2006 08:48  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Hallo, Habe einen Roboter von Kuka mit allen Abhängigkeiten versehenen und
kann ihn dadurch auch in allen 6 Achsen bewegen.
Wenn ich in mühsamer Handarbeit die gewünschte Stellung erreicht habe exportiere ich die Parameter in eine Exceltabelle um sie später wieder einlesen zu können.
Soweit so gut. Um die Positionen aber 100% genau anzufahren habe ich die Abhängigkeiten unterdrückt und versucht an einem fixen Referenzblock
den Roboter über Abhängigkeiten an die Referenz anzudocken, um dann die exakten Winkel auszumessen.
Dabei erhalte ich jedesmal ne Fehlermeldung.
(Abhänngigkeit setzen fehlgeschlagen)
Seltsamerweise kann ich den Roboter in allen Achsen frei bewegen,
wenn ich dran ziehe, nur sehr unkontrolliert. Nun meine Frage:
Gibts ne möglichkeit den Roboter exakt an den betreffenden Referenzpunkten genau auszurichten. Die Suche diesbezüglich ergab schon mal den Hinweis des ein und auslesens der Parameter. http://ww3.cad.de/foren/ubb/Forum50/HTML/003667.shtml#000000 Wie würdet Ihr das machen ?? Gruß Vollmer Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Leo Laimer
Moderator
CAD-Dienstleister
    

Beiträge: 26104
Registriert: 24.11.2002 IV bis 2019
|
 erstellt am: 28. Jul. 2006 08:59 <-- editieren / zitieren --> Unities abgeben: Nur für Vollmer
erstellt am: 28. Jul. 2006 08:59 <-- editieren / zitieren --> Unities abgeben: Nur für Vollmer 
Hallo Vollmer, Ich kann Dir keine echte Lösung bieten, aber ein paar Beobachtungen. Bei meiner aktuellen Arbeit sind auch so Bewegungen erforderlich, und da zeigt es sich dass verschiedene Verknüpfungen sehr zickig und wetterfühlig sind, wie, warum und wieso bleibt ein Geheimnis. Es sollen jedenfalls im Vordergrund nur ganz wenige UnterBG vorhanden sein, und keine einzelnen BT, dann geht's etwas besser. ------------------
mfg - Leo Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Vollmer
Mitglied
Konstrukteur
Beiträge: 149
Registriert: 12.06.2002 Inventor9 SP4 ; Compass4.2
|
erstellt am: 28. Jul. 2006 09:53 <-- editieren / zitieren --> Unities abgeben:
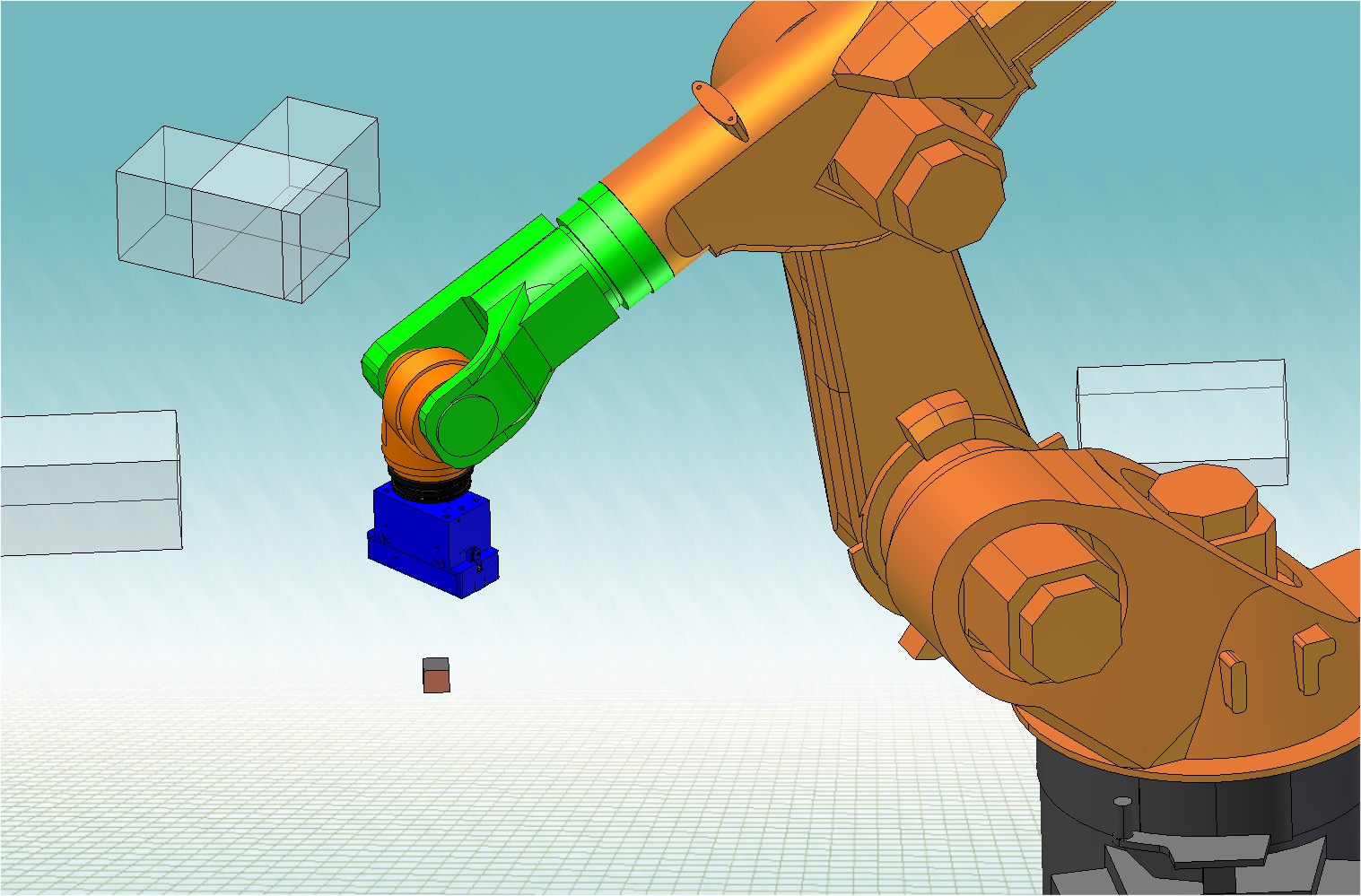
Moin Leo, Hab mal nen Snapshot der Baugruppen angehängt. KR30-3 bewegt sich; anhängende BG Greifer mit Steuerblock bewegt sich mit. Der zu referenzierende Steuerblock befindet sich entweder als Einzelteil in der HBG oder in der UBG Steuerblöcke. Was meinst du:
Vereinfachen,so daß alles was sich bewegt in der BG KR30-3 verbaut ist. Nebenbei:
der Kr30-3 ist natürlich Bestandteil unserer Bibliothek,
d.h. wenn er anderweitig verbaut wird, sollte er eigentlich "solo" sein. Gruß Vollmer Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
W. Holzwarth
Ehrenmitglied V.I.P. h.c.
Dipl.-Ing. Maschinenbau

Beiträge: 9326
Registriert: 13.10.2000 Inventor bis 2024, Rhino 7, Mainboard ASUS ROG STRIX X570F-Gaming, CPU Ryzen 9 5900X, 64 GB RAM, 4 TB SSD, Radeon RX 6900 XT, Dual Monitor 24", Spacemouse Enterprise, Win 10 22H2
|
erstellt am: 28. Jul. 2006 10:08 <-- editieren / zitieren --> Unities abgeben: Nur für Vollmer
Kannste mal das Modell reinstellen oder rüberschicken, wenn's zu groß ist? Manchmal sind es redundant vergebene Abhängigkeiten, die sowas blockieren. Manchmal hilft auch eine Punktkopplung zu Achse oder Ebene, statt Achse zu Achse. Muß man gesehen haben. Ich habe hier im Elfer zum Beispiel eine nicht übertrieben große Baugruppe, die als Kontaktsatz in einer Führungsnut geschwenkt wird. Bewegung mit Cursor funktioniert, Bewegung nach Abhängigkeit ist fehlerhaft. Reduziere ich die Baugruppe dann auf nur wenige ausgewählte Teile, funktioniert auch die Bewegung nach Abhängigkeit. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Leo Laimer
Moderator
CAD-Dienstleister
Beiträge: 26104
Registriert: 24.11.2002 IV bis 2019
|
erstellt am: 28. Jul. 2006 10:14 <-- editieren / zitieren --> Unities abgeben: Nur für Vollmer
Walter schreibt quasi dasselbe, ist einfach zickig. Ich habe eine rel. einfache Bewegung drin, die kann ich durchlaufen lassen ohne Probleme, aber in einem engen Bereich des linearen Ablaufes kann ich es nicht abspeichern. Völlig unlogisch, ist aber so. Und Adaptivität ist IMHO sowieso Teufelszeug. sowieso Teufelszeug.
Meist funktioniert's bei frisch Einrichten sogar, später aber nicht mehr, aus unerfindlichen Gründen. Ist bei meiner BG jedenfalls so.
Und wenn's mal nicht mehr funktioniert, wird's durch Herumrepariere-Versuche meist nur noch schlimmer. ------------------
mfg - Leo Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
olinka
Mitglied
Maschinenbauingenieur
Beiträge: 399
Registriert: 23.05.2003 AutoCAD Mechanical 2007
Autodesk Inventor Series 11-SP2
Intel Core 2 - 6600@2,4 GHz / 3.00 GHz
2 GB RAM
NVIDIA Quadro FX 1500 Grafikkarte
Windows XP prof.-SP2
|
erstellt am: 28. Jul. 2006 10:40 <-- editieren / zitieren --> Unities abgeben: Nur für Vollmer
Moin, bewegst Du den Robbi den innerhalb der BG KR30-3 oder in der Hauptbaugruppe? Dann muss die Robbi-BG doch flexibel sein!?!
Was machst Du denn mit der Adaptivität?
Willst Du darüber positionieren? Vielleicht spielt Dir aber auch die Bibliothek einen Streich?
Vielleicht sollte man den Robbi in den Workspace legen? ------------------
Viele Grüße,
Olaf.  [Diese Nachricht wurde von olinka am 28. Jul. 2006 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Vollmer
Mitglied
Konstrukteur
Beiträge: 149
Registriert: 12.06.2002 Inventor9 SP4 ; Compass4.2
|
erstellt am: 28. Jul. 2006 11:21 <-- editieren / zitieren --> Unities abgeben:
|
Leo Laimer
Moderator
CAD-Dienstleister
Beiträge: 26104
Registriert: 24.11.2002 IV bis 2019
|
erstellt am: 28. Jul. 2006 11:26 <-- editieren / zitieren --> Unities abgeben: Nur für Vollmer
|
olinka
Mitglied
Maschinenbauingenieur
Beiträge: 399
Registriert: 23.05.2003 AutoCAD Mechanical 2007
Autodesk Inventor Series 11-SP2
Intel Core 2 - 6600@2,4 GHz / 3.00 GHz
2 GB RAM
NVIDIA Quadro FX 1500 Grafikkarte
Windows XP prof.-SP2
|
erstellt am: 28. Jul. 2006 11:32 <-- editieren / zitieren --> Unities abgeben: Nur für Vollmer
Für den Robis gilt ja: "viele Wege führen nach Rom!" - es gibt für eine Punktbestimmung im Raum ja unendlich viele Achspositionen (ob nun sinnvoll oder nicht). Möchtest Du den Robi mit Werkzeug animieren oder nur prüfen, ob er alle Punkte erreicht?
Ansonsten gibt es doch auch Simulationssoftware von KUKA - weiß allerdings nicht, ob die was kost'. Verstehe ich richtig, dass Du die Adaptivität nutzt, um die Positionen auslesen zu können?
(Sorry: Hatte noch keine Zeit, mir den entsprechenden Thread anzusehen). ------------------
Viele Grüße,
Olaf. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Charly Setter
Moderator

Beiträge: 11977
Registriert: 28.05.2002 Der vernünftige Mensch paßt sich der Welt an;
der unvernünftige besteht auf dem Versuch, die Welt sich anzupassen.<P>Deshalb hängt aller Fortschritt vom unvernünftigen Menschen ab.
(George Bernard Shaw)
|
erstellt am: 28. Jul. 2006 11:46 <-- editieren / zitieren --> Unities abgeben: Nur für Vollmer
Zitat:
Original erstellt von Leo Laimer:
Dosiert und richtig angewendet nicht 
------------------
Der vernünftige Mensch paßt sich der Welt an;
der unvernünftige besteht auf dem Versuch, die Welt sich anzupassen. Deshalb hängt aller Fortschritt vom unvernünftigen Menschen ab.
(George Bernard Shaw) Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Vollmer
Mitglied
Konstrukteur
Beiträge: 149
Registriert: 12.06.2002 Inventor9 SP4 ; Compass4.2
|
erstellt am: 28. Jul. 2006 11:48 <-- editieren / zitieren --> Unities abgeben:
@Leo Teufelszeug und weit und breit kein Weihwasser Das iss wohl war. Würd ich das Ding bei mir zu Haus im stillen Kämmerlein zusammenbauen würd ich die Baugruppenstruktur eh drastisch vereinfachen. Nur muß ich mich hier an einen gewisse Ordnung halten, da ja einzelne Baugruppen von meinen Arbeitskollegen auch in anderen Projekten verwendet werden. @Olaf
Will prüfen ob er alle Positionen erreicht.
Das auslesen ist nur um alle Positionen abzuspeichern und bei Bedarf wieder einzulesen.
Gruß Vollmer
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Leo Laimer
Moderator
CAD-Dienstleister
Beiträge: 26104
Registriert: 24.11.2002 IV bis 2019
|
erstellt am: 28. Jul. 2006 12:06 <-- editieren / zitieren --> Unities abgeben: Nur für Vollmer
Zitat:
Original erstellt von Charly Setter:
Dosiert und richtig angewendet nicht
Mathias,
Wenn man all die blutigen Nasen weltweit zusammenzählt fürchte ich wird Adaptivität bis an's Ende aller Tage den kollektiven Schaden nicht aufholen können der damit angerichtet wurde. Wenn ich nur an die reisigen Werbungen denke "für" Adaptivität. Und noch heute kann man sich der Adaptivität kaum erwehren, und wird's in manchen Stuationen fast nicht mehr los. Also richtig, wenn man weiss was man tut kann man's dosiert und richtig anwenden und Nutzen daraus ziehen.
Aber bis man weiss was man tut... Brrrr ------------------
mfg - Leo Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
W. Holzwarth
Ehrenmitglied V.I.P. h.c.
Dipl.-Ing. Maschinenbau
Beiträge: 9326
Registriert: 13.10.2000 Inventor bis 2024, Rhino 7, Mainboard ASUS ROG STRIX X570F-Gaming, CPU Ryzen 9 5900X, 64 GB RAM, 4 TB SSD, Radeon RX 6900 XT, Dual Monitor 24", Spacemouse Enterprise, Win 10 22H2
|
 erstellt am: 28. Jul. 2006 12:12 <-- editieren / zitieren --> Unities abgeben: Nur für Vollmer
erstellt am: 28. Jul. 2006 12:12 <-- editieren / zitieren --> Unities abgeben: Nur für Vollmer
Ich habe ja einen gewissen Informationsvorsprung   Mir fällt dabei auf, daß Ihr oft mit Passend-Passend-Abhängigkeiten arbeitet. Ich sehe zu, daß ich Bauteile möglichst nur einer Einfüge-Abhängigkeit und einem Winkel festsetze. Je weniger das Erfinderlein rechnen muß, umso besser. Und prüft bitte mal, ob die Arbeitsachse3 in Bauteil 5A3 korrekt ist. Ich hab' den Verdacht, die sitzt exzentrisch .. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Doc Snyder
Moderator
Dr.-Ing. Maschinenbau, Entwicklung & Konstruktion von Spezialmaschinen

Beiträge: 13310
Registriert: 02.04.2004 IV 2019 + 2020 + 2021
W7pro64 F-Secure-Safe
Dell-M4600 2,13GHz 12GB
Quadro2000M
15,4"1920x1080
MS-IntelliMouse-Optical
SpacePilotClassic
|
erstellt am: 28. Jul. 2006 12:18 <-- editieren / zitieren --> Unities abgeben: Nur für Vollmer
Moin! Adaptivität ist kein Teufelszeug, aber für eine Bibliotheksbauguppe ist sie grundsätzlich das falsche Mittel. Das Ding deshalb mehrfach zu kopieren ist Unsinn. Flexibilität gehört hier hin. Hast Du es schon mal damit versucht? Wenn das auch nicht hilft, füge den Robsi nicht als eine flexible Baugruppe ein, sondern füge seine Komponenten einzeln ein, so dass alle Abhängigkeiten auf einer Baugruppenebene gerechnet werden.
- Fasse alles, was seine Position zueinander behält, in jeweils eine Baugruppe zusammen und setze erst dann die Abhängigkeiten.
- Benutze so wenig Abhängigkeiten wie möglich (z.B. "Einfügen"!).
- Setze keine überberstimmten Abhängigkeiten (z.B. nicht "passend"-Fläche-auf-Fläche, wenn Parallelität schon gegeben ist, sondern dann nur noch Punkt-auf-Fläche. Die Abhängigkeiten bilden ein multidimensionales Gleichungssystem, das iterativ gelöst werden muss. Es hängt vom Zufall ab, ob sich dabei unlösbare Stellungen ergeben. Je einfacher die Zusammenhäng sind, desto geringer wird die Wahrscheinlichkeit für solche Probleme. Bilde also sinnvoll und häufig Untebaugruppe, damit die Anzahl der Gleichungen gering bleibt. Eine weiter, in diesem Sinne komplett wasserdichte Methode wäre, rückwärts vorzugehen, also alle Gelenke lösen (Abhängigkeiten löschen), dann den Greifer in Position bringen und die Gelenke eins nach dem anderen wieder verbinden (mit Einfügen sollte das sehr schnell gehen). Dann sieht man auch gleich, wo es hakt. Finde Dich damit ab, Abhängigkeiten oft neu zu erstellen, das hat eigentlich nur Vorteile. (Z.B. lernst Du auch schneller, Dich auf das Mindeste zu beschränken )
Eine sinnvolle und klare Struktur ist immer nützlich.
Und lass alles weg, was nicht nötig ist! (Was ist das für eine Unzahl Stuerblöcke?) Gruß
Roland ------------------
www.Das-Entwicklungsbuero.de Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Robsi
Mitglied
Maschinentechniker
Beiträge: 389
Registriert: 30.01.2003 Win 10, 32 GB RAM, GTX980
Product Design Suite Ultimate 2018
|
 erstellt am: 28. Jul. 2006 12:48 <-- editieren / zitieren --> Unities abgeben: Nur für Vollmer
erstellt am: 28. Jul. 2006 12:48 <-- editieren / zitieren --> Unities abgeben: Nur für Vollmer
|
Vollmer
Mitglied
Konstrukteur
Beiträge: 149
Registriert: 12.06.2002 Inventor9 SP4 ; Compass4.2
|
 erstellt am: 28. Jul. 2006 13:34 <-- editieren / zitieren --> Unities abgeben:
erstellt am: 28. Jul. 2006 13:34 <-- editieren / zitieren --> Unities abgeben:
Hallo an alle, Danke für eure zahlreichen Tipps, werden uns mal nach KUKA-Sim erkundigen.
Vorest werd ich einige Positionen grob händisch anfahren.
(kein Problem nur mühsam) @Doc Snyder
zu handeln sind ca. 200 verschiedene Steuerblöcke in allen
möglichen Positionen.  Vorsicht Frustabbau 
Krieg die letze Zeit nur noch eierlegende Wollmilchsäue als Auftrag
auf den Tisch geknallt.  Kann alles,billig und schnell konstruiert Frustabbau Ende Schönes Wochenende 
Gruß
Vollmer Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
demani
Mitglied
Konstrukteur
Beiträge: 362
Registriert: 09.12.2004 AIS2012/SP1 Win7/64
core i5 3,33GHz ; 12 GB-Ram ; Nvidia-Quadro-FX-580
|
erstellt am: 28. Jul. 2006 13:36 <-- editieren / zitieren --> Unities abgeben: Nur für Vollmer
Zitat:
Original erstellt von Doc Snyder:Eine weiter, in diesem Sinne komplett wasserdichte Methode wäre, rückwärts vorzugehen, also alle Gelenke lösen (Abhängigkeiten löschen), dann den Greifer in Position bringen und die Gelenke eins nach dem anderen wieder verbinden (mit Einfügen sollte das sehr schnell gehen). Dann sieht man auch gleich, wo es hakt. [/B]
oft reicht es aus die problematischen Abhängigkeiten zu unterdrücken und dann versuchsweise in unterschiedlicher Reihenfolge wieder zu aktivieren.
Oder versuche die Bauteile von Hand mit dem Befehl "Komponente drehen" oder Komponente schieben" ungefähr in die gewünschte Postion zu schieben und dann mit "aktualisieren" alles wieder ausrichten.
mfg demani
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
olinka
Mitglied
Maschinenbauingenieur
Beiträge: 399
Registriert: 23.05.2003 AutoCAD Mechanical 2007
Autodesk Inventor Series 11-SP2
Intel Core 2 - 6600@2,4 GHz / 3.00 GHz
2 GB RAM
NVIDIA Quadro FX 1500 Grafikkarte
Windows XP prof.-SP2
|
erstellt am: 28. Jul. 2006 13:48 <-- editieren / zitieren --> Unities abgeben: Nur für Vollmer
|
Vollmer
Mitglied
Konstrukteur
Beiträge: 149
Registriert: 12.06.2002 Inventor9 SP4 ; Compass4.2
|
erstellt am: 28. Jul. 2006 14:07 <-- editieren / zitieren --> Unities abgeben:
Hallo Olaf, iss noch aktuell, ja gibts schon. Hab den Rob flexibel geschaltet alle Abhängigkeiten
im Rob unterdrückt , angedockt an Referenzteil und dann nacheinander wieder aktiviert.
Siehe da 3 Abhängigkeiten "motzen"
Wie von Walter in einem vorherigen Beitrag schon hingewiesen,
iss der rob wohl nicht richtig aufgebaut. Muss das alles wieder kontrollieren.
Der orginal Rob von Kuka ist dermaßen Sch... das ich ihn
teilweise korrekt nachmodellieren muß.
scheint beim step ex-import wohl etwas gelitten haben.
(Was machen Sie eigentlich die ganze Zeit??... ) Gruß Vollmer Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
olinka
Mitglied
Maschinenbauingenieur
Beiträge: 399
Registriert: 23.05.2003 AutoCAD Mechanical 2007
Autodesk Inventor Series 11-SP2
Intel Core 2 - 6600@2,4 GHz / 3.00 GHz
2 GB RAM
NVIDIA Quadro FX 1500 Grafikkarte
Windows XP prof.-SP2
|
erstellt am: 28. Jul. 2006 14:25 <-- editieren / zitieren --> Unities abgeben: Nur für Vollmer
Eigentlich solltest Du innerhalb der Robi-BG die "Gelenk-Abhängigkeiten" an den Achsen definieren - dann ist er ja (wie auch in der Realität) voll beweglich - wie vorher schon mal geposted über "Einfügen", da Du dann nur eine Abhängigkeit hast. IMHO dürfte dann auch nichts mehr meckern - wenn das Modell i.O. ist. Bietet KUKA nur STEP an? Hast Du schon andere Formate versucht?
Ich habe bisher eigentlich mit SAT-Files gute Erfahrungen gemacht - auch was die Bauteil- und Dateibenennung angeht. ------------------
Viele Grüße,
Olaf. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Vollmer
Mitglied
Konstrukteur
Beiträge: 149
Registriert: 12.06.2002 Inventor9 SP4 ; Compass4.2
|
erstellt am: 28. Jul. 2006 15:12 <-- editieren / zitieren --> Unities abgeben:
Hallo Olaf, Kuka gibts nur in step oder iges die für mich einlesbar sind Abhängigkeit Einfügen usw.
is schon klar aber es stimmen die Bezugsebenen nicht alle,
Flächen stehen nicht winklig zueinander bsp. 89,78°.
Zentrumspunkte zueinander stimmen nicht usw. usw. deshalb mußte ich eigene Ebenen mit zugehörigen Achsen basteln.
werd jetz die Teile nachbearbeiten das ich über Einfügen und winkel
sonst keine Abhängigkeiten mehr brauch. Dank dir schön Gruß Vollmer Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Vollmer
Mitglied
Konstrukteur
Beiträge: 149
Registriert: 12.06.2002 Inventor9 SP4 ; Compass4.2
|
erstellt am: 28. Jul. 2006 16:17 <-- editieren / zitieren --> Unities abgeben:
|
W. Holzwarth
Ehrenmitglied V.I.P. h.c.
Dipl.-Ing. Maschinenbau
Beiträge: 9326
Registriert: 13.10.2000 Inventor bis 2024, Rhino 7, Mainboard ASUS ROG STRIX X570F-Gaming, CPU Ryzen 9 5900X, 64 GB RAM, 4 TB SSD, Radeon RX 6900 XT, Dual Monitor 24", Spacemouse Enterprise, Win 10 22H2
|
erstellt am: 28. Jul. 2006 16:20 <-- editieren / zitieren --> Unities abgeben: Nur für Vollmer
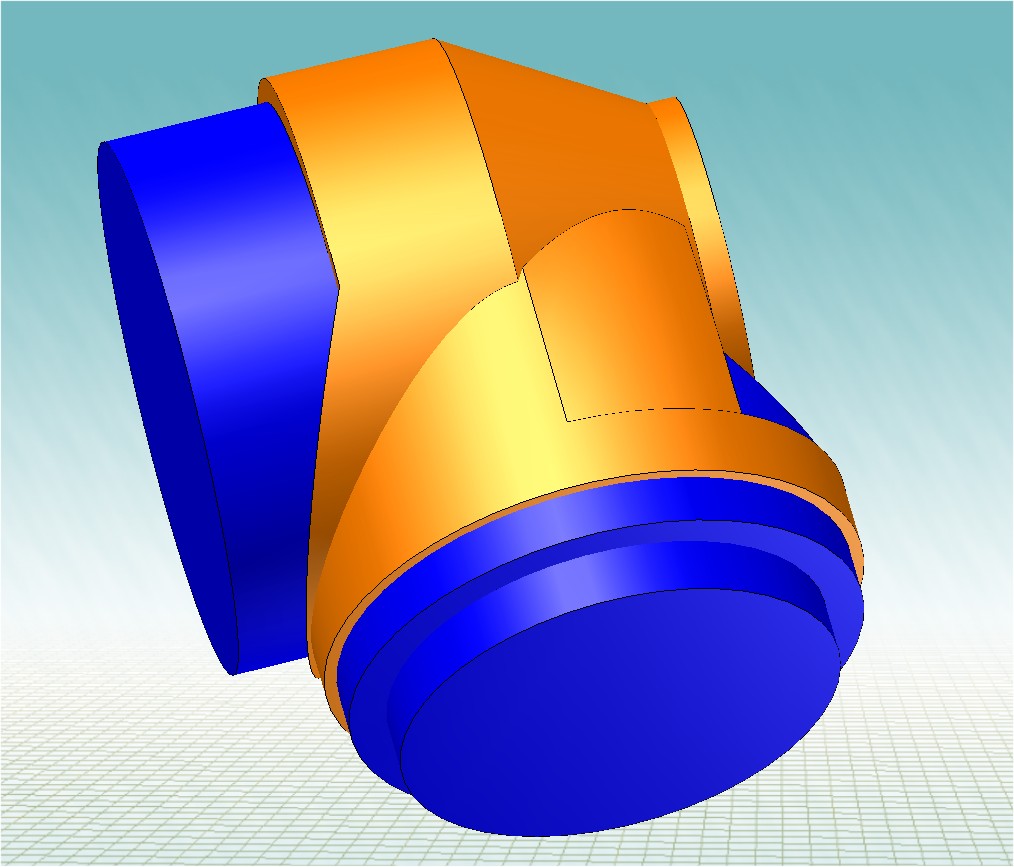
So, ich hab' das Ding mal nachgepfriemelt. Nicht besonders exakt war die Ausgangsbasis, aber bereits KUKA-seitig. Am Teil A5 habe ich lange rumgeschnitzt, um es wieder sauber zu kriegen. Da gab es Flächensprünge, nicht parallele Außenflächen, Achsversätze im knapp Zehntelbereich, und schiefe Zylinder. Eigentlich nur Schönheitsfehler, aber mich stört sowas. Tja, und dann hab' ich das Ding weitgehend mit Einfügen constraint, mit Ausnahme dieser seltsam versetzten Achse am Teil A2. Da geht nur Passend-Passend. Ein paar doppelte Abhängigkeiten hab' ich rausgeschmissen. Und anschließend konnte der Robbi dann in Position ploppen. Manchmal hilft es, sich schrittweise ranzutasten: Zuerst 3 Winkelabhängigkeiten vergeben ist eine Möglichkeit. Danach dann 3 fluchtende Abhängigkeiten. Die Winkel kann man anschließend wieder löschen. Oder man vergibt zuerst die vertikale fluchtende Abhängigkeit. Das muß zuerst passen, und ist auch am leichtesten. Danach dann noch 2x Fluchtend hinterher. Wenn nötig, kann ich das Unglücksteil A5 mal reinstellen, als 11er IPT und als STEP.
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Vollmer
Mitglied
Konstrukteur
Beiträge: 149
Registriert: 12.06.2002 Inventor9 SP4 ; Compass4.2
|
erstellt am: 28. Jul. 2006 16:20 <-- editieren / zitieren --> Unities abgeben:
|
Vollmer
Mitglied
Konstrukteur
Beiträge: 149
Registriert: 12.06.2002 Inventor9 SP4 ; Compass4.2
|
 erstellt am: 28. Jul. 2006 16:32 <-- editieren / zitieren --> Unities abgeben:
erstellt am: 28. Jul. 2006 16:32 <-- editieren / zitieren --> Unities abgeben:
|
W. Holzwarth
Ehrenmitglied V.I.P. h.c.
Dipl.-Ing. Maschinenbau
Beiträge: 9326
Registriert: 13.10.2000 Inventor bis 2024, Rhino 7, Mainboard ASUS ROG STRIX X570F-Gaming, CPU Ryzen 9 5900X, 64 GB RAM, 4 TB SSD, Radeon RX 6900 XT, Dual Monitor 24", Spacemouse Enterprise, Win 10 22H2
|
erstellt am: 28. Jul. 2006 20:32 <-- editieren / zitieren --> Unities abgeben: Nur für Vollmer
So, hier ist das fehlerhafte Teil. Alles, was im Bild blau markiert ist, hat 'ne Macke. Das STEP-Teil sollte nun halbwegs passen. Bei der IPT (IV 11) läßt sich das Bauteilende schrittweise nach unten ziehen. Man sieht dann die Änderungen. Ist 'n besonderer Service für unsere Studenten. Dasse was lernen ... Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Vollmer
Mitglied
Konstrukteur
Beiträge: 149
Registriert: 12.06.2002 Inventor9 SP4 ; Compass4.2
|
erstellt am: 31. Jul. 2006 15:39 <-- editieren / zitieren --> Unities abgeben:
Juchee Juchee So, hab den Robi penibelst neu aufgebaut (100,00000000% Maße) und Siehe da er lässt sich andocken ; kreisch,jubel Jetzt noch schnell die Winkel rausgemessen in die Exceltabelle rein,
so kann ich jede Position wieder importieren und anfahren. Muß zugeben etwas naiv zu denken es wird bei der Genauigkeit des Robs
nicht so genau drauf ankommen. Nochmals vielen Dank an Walter der mich auf diesen Fehler letztendlich
hingewisen hat.
Dein korrigiertes Teil hab ich natürlich verbaut  Im Robi selbst gibts nur noch Einfüge und Winkelabhängigkeiten.
Man is ja noch lernfähig Gruß und Dank an alle
Vollmer Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de (alle Foren)
Foren auf CAD.de (alle Foren)



 |
|