Hallo Zusammen,
Mein Problem in kurz: flexible Motionsimulation gekoppelt mit Matlab/Simunlink
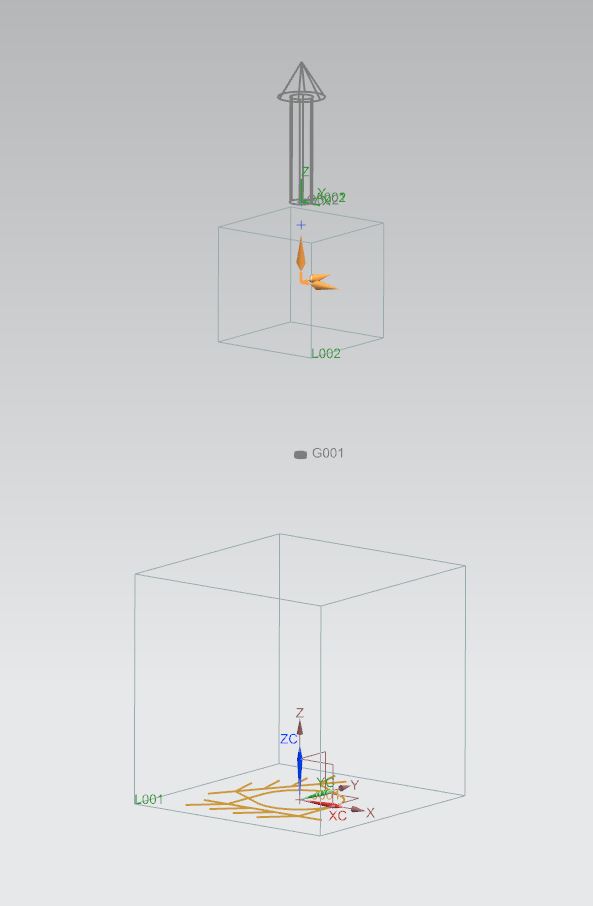
Ich habe ein einfaches Motionmodell aus zwei Massen aufgebaut, die mit einem Feder-Dämpferelement (Buchse) verbunden sind, der untere Teil ist am Boden fixiert und der obere Teil wird von einer Kraft angeregt. (Siehe Bild: Einamssenschwinger)
Dieses Modell habe ich durch eine Cosimualtion mit MATLAB/Simulink Version 11b gekoppelt. Dabei wird ein Kraftsignal von Simulink aufbereitet, als Input an das Motion-Modell gegeben, dort Messe ich die entstandene Verlagerung und gebe sie als Output an Matlab zurück. Mein geschriebenes Matlabskript berechnet mir die Übertragungsfunktion und plottet mir das Bodediagramm und den Phasengang.
Wenn ich die Cosimulation mit den 'starren' Körpern durchlaufen lasse, klappt alles einwandfrei.
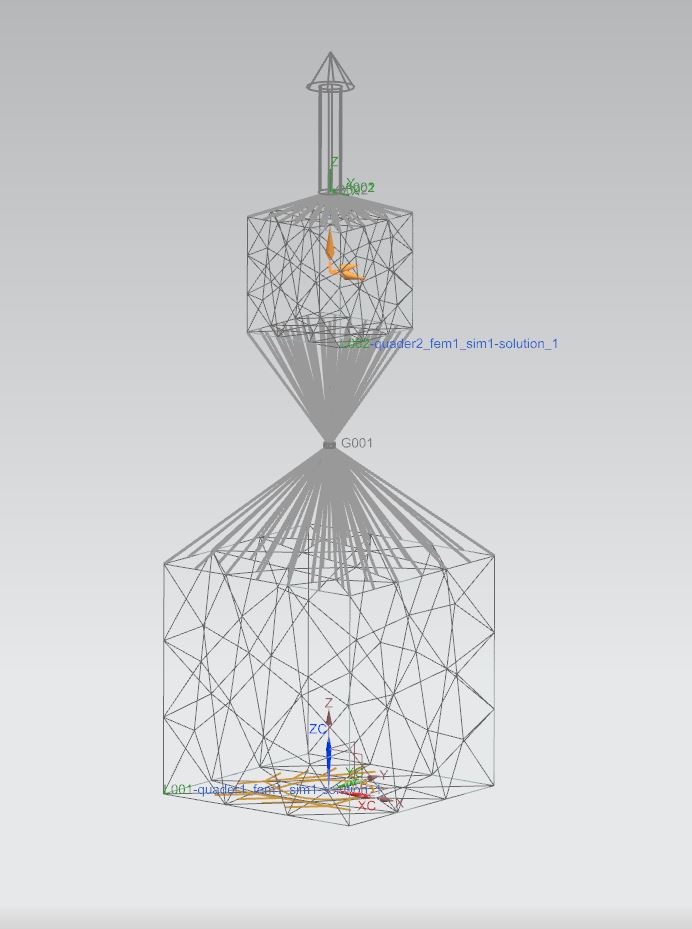
Sobald ich die flexiblen Körper in das Modell einfüge (Bild: Einmassenschwinger_flexibel), läuft die Rechnung nicht mehr. MATLAB spuckt den Fehler aus:
=== Error Message ========================
1. NX/Motion Model is invalid
=> Modify NX/Motion Model and restart simulation
2. Bigger waiting time is needed to open NX/Motion Model
=> Increase Waiting time and restart the simulation
==========================================
=== Error Message ========================
The number of plant input of Simulink is not equal to the number of plant input of NX/Motion.
The number of plant output of Simulink is not equal to the number of plant output of NX/Motion.
==========================================
Im FE-Modell der Teile, habe ich für die Bushings RBE2 Elemente genommen, und als Zwangsbedingungen an den Koppelstellen Free DOF, bzw an der Fixierungsstelle zum Boden ein fixed DOF.
Dazu sei noch bemerkt:
Die flexible Cosimulation lässt sich ja auch mit NX als Host berechnen, da enstehen auch keine Probleme, und die Verlagerungen der flexiblen Körper werden in der Animation angezeigt.
An welcher Stelle liegt mein Fehler? Habe ich die flexiblen Körper falsch aufgebaut, bzw. die Koppelstellen mit falschen Elementen belegt?
Oder kann ich NX8.5 nicht mit MATLAB 11b für die Berechnung mit flexiblen Körpern koppeln?
Ich bitte euch um Rat,
Danke schonmal und Grüße,
Linda
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP

 Foren auf CAD.de (alle Foren)
Foren auf CAD.de (alle Foren)



 |
|