|
Autor
|
Thema: Kontakt zwischen Rigid-Bodys (1624 / mal gelesen)
|
kevint
Mitglied
Student

   Beiträge: 18
Registriert: 22.12.2014 PTC Creo 2.0, 3.0, 4.0
Abaqus/CAE 2017
|

 erstellt am: 05. Dez. 2017 12:44
erstellt am: 05. Dez. 2017 12:44  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
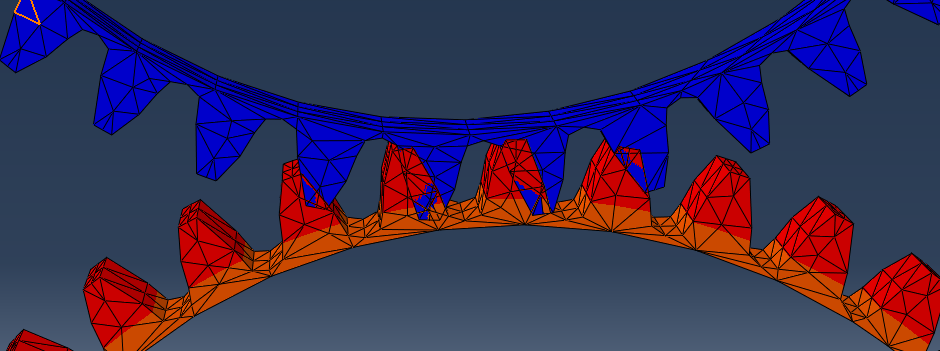
Sehr geehrte Damen und Herren, Ich möchte mittels Abaqus zwei Zahnräder simulieren. Das eine Zahnrad soll hierbei das andere antreiben. Da mich die Verformungen und Spannungen in den Zahnrädern nicht interessiert, sondern nur die Laufeigenschaften, habe ich die Zahnräder als Rigid-Bodys definiert. Nun habe ich allerdings Probleme mit der Kontaktdefinition zwischen den beiden Zahnrädern. Ich habe den Kontakt als "general contact" erstellt als "hard contact" und "frictionless". Trotz dieser Definition durchdringen sich die beiden Körper, wie auf dem angefügten Bild zu sehen ist. Ein Grund hierfür könnte sein, dass ich beim "anzutreibenden" Zahnrad alle Freiheitsgrade gesperrt habe. Denn wenn ich den eigentlich benötigten Rotationsfreiheitsgrad offen lasse, bekomme ich folgende Fehlermeldung:
"The rigid bodies with the reference nodes contained in node set ErrNodeRefNodeNoRot1Axis have atleast one axis about which the rotary inertia magnitude is zero, and the rigid bodies have atleast one rotational degree of freedom which is unconstrained. Either rotary inertia must be defined at the reference nodes or all of the rotational degrees of freedom at the reference nodes must be constrained. See the status file for further details." Es würde mich freuen, wenn mir jemand helfen könnte dieses Problem zu lösen. Grüße,
Kevin
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Mustaine
Ehrenmitglied V.I.P. h.c.
Beiträge: 3554
Registriert: 04.08.2005 Abaqus
|
erstellt am: 15. Dez. 2017 16:49 <-- editieren / zitieren --> Unities abgeben: Nur für kevint 
Naja, wenn du eine Rotation am Antrieb vorgibst, die Körper starr sind und der Abtrieb blockiert ist, dann ist dein System überbestimmt. Mit General Contact hast du aber mit der Penalty-Methode eine Nachgiebigkeit, die du dann auf dem Bild siehst. Du könntest für die Rotation am Abtrieb eine Drehfeder vorgeben. Damit kannst du den Widerstand definieren und dein System ist weder über- noch unterbestimmt. Falls der Widerstand darin aber höher ist als die Penalty-Steifigkeit im Kontakt, wird dieser wieder nachgeben. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
kevint
Mitglied
Student
Beiträge: 18
Registriert: 22.12.2014 PTC Creo 2.0, 3.0, 4.0
Abaqus/CAE 2017
|
erstellt am: 18. Dez. 2017 19:12 <-- editieren / zitieren --> Unities abgeben:
Also danke für die Antwort. Mein Fehler war allerdings, dass ich den Körper als rigid-body definiert habe und ich einen rigid body nicht bewegen kann. Wenn ich es mit einer rigid-body Constraint mache funktioniert es allerdings. BTW") . andere Frage: . andere Frage:
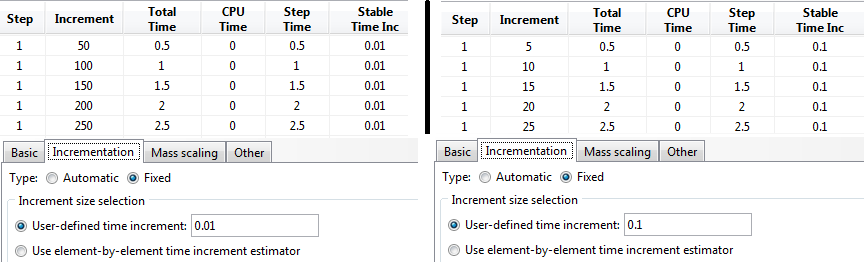
Weist du ob bzw. wie man die Step-Zeit pro Berechnungs-/Ergebnisschritt verringern kann? Da ich mit rigid bodies arbeite muss ich nämlich (wenn ich das richtig verstanden habe) die user defined time increment angeben. Egal was ich da allerding eingebe, der Step wird trotzdem in 0,5 sek schritten berechnet (die Anzahl der Inkrements änder sich aber sonst nichts). Ich hätte das ERgebnis aber lieber in 0,1 sek Schritten. --> Ich möchte sozusagen im angefügten Bild die total time schritte verkürzen Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Mustaine
Ehrenmitglied V.I.P. h.c.
Beiträge: 3554
Registriert: 04.08.2005 Abaqus
|
 erstellt am: 19. Dez. 2017 10:43 <-- editieren / zitieren --> Unities abgeben: Nur für kevint
erstellt am: 19. Dez. 2017 10:43 <-- editieren / zitieren --> Unities abgeben: Nur für kevint
Man kann einen Rigid Body ebenso bewegen wie einen Deformable Body mit Rigid Body Constraint. Man muss nur im Part-Modul den Steuerknoten angeben, kann diesen dann aber im Load-Modul ganz normal verwenden. Ich bevorzuge aber auch die Variante über einen Constraint, da man später ggf. einfacher wieder auf einen deformierbaren Körper umstellen kann.
Die Dauer der Prozedur gibst du in dem Basic-Tab von deinem Bild vor. Das mit der Inkrementierung ist bekannt. Außerdem musst du noch überlegen, wie du den Field Output Request einstellst um zu regeln, wie häufig Ergebnisse in die ODB geschrieben werden. Das war's. Das was in dem Monitoring-Fenster dann ausgegeben wird, ist teilweise nach anderen Kriterien unterteilt und dient anderen Zwecken. Ggf. während der Analyse mal einen Blick in die .sta-Datei werfen.
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
kevint
Mitglied
Student
Beiträge: 18
Registriert: 22.12.2014 PTC Creo 2.0, 3.0, 4.0
Abaqus/CAE 2017
|
erstellt am: 19. Dez. 2017 22:56 <-- editieren / zitieren --> Unities abgeben:
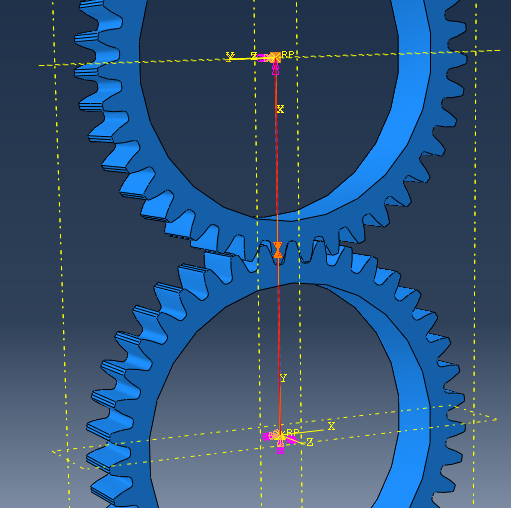
Du hast Recht, man kann beide bewegen. Aber man kann wenn man es über ein Constraint macht einen Freiheitsgrad frei lassen. das habe ich bei einem direkt als rigid body definierten Körper nicht hinbekommen. Die Übertragung der Bewegung habe ich jetzt hinbekommen. Wenn ich jetzt aber zusätzlich eine Axialkraft (s.Bild) (Axial-Connector mit Connector-Force) kommt es wieder zur Durchdringung der Körper. Liegt das daran, dass die Kraft höher ist als die Steifigkeit des Penalty-Kontakts? Wie kann man denn die Steifigkeit des General Kontakts erhöhen? Danke übrigens für deine zahlreichen Hilfestellungen Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Mustaine
Ehrenmitglied V.I.P. h.c.
Beiträge: 3554
Registriert: 04.08.2005 Abaqus
|
erstellt am: 20. Dez. 2017 09:57 <-- editieren / zitieren --> Unities abgeben: Nur für kevint
Als erstes solltest du mal prüfen, ob die Materialdaten und das Einheitensystem in Ordnung sind. Die Körper sind zwar rigid, für die Berechnung der Penalty-Steifigkeit wird aber die Materialsteifigkeit verwendet. Ansonsten kann man die Penalty-Steifigkeit bei den Contact Properties (Normal Behavior) skalieren. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
| Anzeige.:
Anzeige: (Infos zum Werbeplatz >>)
 |

 Foren auf CAD.de (alle Foren)
Foren auf CAD.de (alle Foren)



 |
|