|
Autor
|
Thema: Starrkörperrotation (2071 mal gelesen)
|
Friendly
Mitglied

   Beiträge: 69
Registriert: 05.06.2017
|

 erstellt am: 19. Okt. 2018 18:52
erstellt am: 19. Okt. 2018 18:52  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
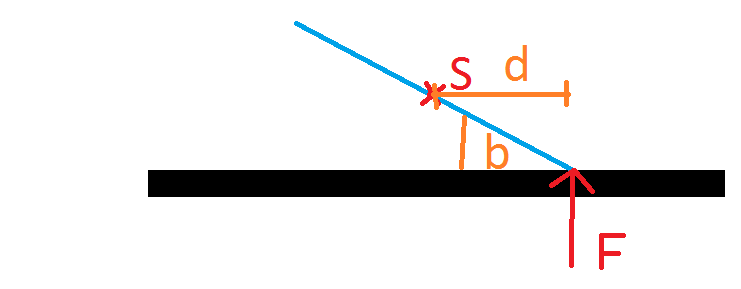
Hallo zusammen! Folgenden Fall möchte ich gerne berechnen: Ein Stab mit bekannter Masse und bekannten Massenträgheitsmomenten (im Schwerpunkt) fällt schräg auf einen Boden (siehe Bild). Ich möchte berechnen, wie lange es dauert, bis das obere Ende des Stabes durch die daraug folgende Drehung auf den Boden trifft! Mein Ansatz lautet wie folgt: F*d = I * alpha (alpha ist die Winkelbeschleunigung, I das Massenträgheitsmoment) -> alpha = F*d/I -> (d^2 phi) / dt^2 = F*d/I (Integration) phi = -1/2*(F*d)/I*t^2+c1*t+c2 (c1= anfängliche winkelgeschwindigkeit und c2= ist der Anfangswinkel und phi der Drehwinkel durch die Kraft) Ich setze c1 und c2 auf 0 und erhalte dadurch die Winkeländerung in Abhängigkeit der Zeit. Ich gehe davon aus, dass die Kraft für einen infinitisimalen Zeitraum wirkt und daraufhin das Moment in den Stab geprägt wird. Ich wünsche euch ein tolles Wochenende!
Friendly Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
N.Lesch
Ehrenmitglied V.I.P. h.c.
Dipl. Ing.
Beiträge: 5122
Registriert: 05.12.2005 WF 4
|
erstellt am: 19. Okt. 2018 19:13 <-- editieren / zitieren --> Unities abgeben: Nur für Friendly 
Hallo, bei Rotation ist Kraft F schon falsch, da gibt es nur ein Drehmoment. Nährungsweise geht das viel einfacher. Das obere Ende verzögert sich nicht
und Du kannst einfach mit dem freien Fall weiterrechnen. ------------------
Klaus Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Friendly
Mitglied
Beiträge: 69
Registriert: 05.06.2017
|
erstellt am: 20. Okt. 2018 12:05 <-- editieren / zitieren --> Unities abgeben:
Hallo N.Lesch, danke erstmal für die Antwort! Wieso ist die Kraft F falsch? Die Kraft wirkt kurz und daraufhin induziert sie ein Drehmoment um den Schwerpunkt des Balkens. So zumindest dachte ich es mir. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
N.Lesch
Ehrenmitglied V.I.P. h.c.
Dipl. Ing.
Beiträge: 5122
Registriert: 05.12.2005 WF 4
|
erstellt am: 20. Okt. 2018 12:53 <-- editieren / zitieren --> Unities abgeben: Nur für Friendly
Du kannst das rotatorisch rechnen mit Moment, Winkelbeschleunigung und Masseträgheitsmoment. Oder Du kannst es translatorisch ( gerdalinige Bewegung ) rechnen mit Kraft, Beschleunigung und Masse. Bei Translation geht auch angenähert eine Schiefe Ebene. Du kannst das aber nicht durcheinander bringen.
------------------
Klaus Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Roland Schröder
Ehrenmitglied V.I.P. h.c.
Dr.-Ing. Maschinenbau, Entwicklung & Konstruktion von Spezialmaschinen

Beiträge: 13189
Registriert: 02.04.2004 Entwicklung von Spezialmaschinen und Mechatronik
Autodesk Inventor
|
erstellt am: 20. Okt. 2018 16:30 <-- editieren / zitieren --> Unities abgeben: Nur für Friendly
Zitat:
Original erstellt von N.Lesch:
Hallo, bei Rotation ist Kraft F schon falsch, da gibt es nur ein Drehmoment.
Nicht gleich schimpfen, da steht doch F*d, und das ist ein Drehmoment! Und von außen wirken da auch nur Kräfte. Falsch ist hingegen, dass das obere Ende sich unbeeinflusst weiter nach unten bewegen würde. Und "schiefe Ebene" hat hier nichts verloren. Kein Durcheinander bitte! Das Problem ist nicht trivial. Der Ansatz, die Krafteinwirkung über den Hebelarm in Rotation umzurechnen, ist schon mal in Ordnung, aber so einfach wie gedacht ist das alles nicht. Infinitesimal kurz wirkt die Kraft schon mal nicht, denn dann hätte sie auch keine Wirkung. Die gezeigte Gleichung gilt nur als Basis für eine infinitesimale Betrachtung und muss integriert werden, aber nicht so wie gezeigt, denn wie groß ist die Kraft überhaupt? Die ausgeführte Integration tut so, als wäre die Kraft konstant und bekannt, aber beides ist sie nicht. Die Stoßkraft nimmt vom Moment der Berührung je nach Steifigkeit des Kontakts allmählich zu, und dabei erzeugt sie nicht nur die Rotation des Körpers, sondern verringert auch seine Fallgeschwindigkeit, und das führt beides dazu, dass die Kraft - je nach Steifigkeit und Elastizität des Kontakts - bald wieder abnimmt. Unter Umständen, bei einem sehr elastischen Stoß und einem sehr steilen Winkel, springt der Stab sogar wieder hoch, ohne dass das obere Ende (zunächst) den Boden berührt. Es muss also neben den Eigenschaften des Kontaktes auch die Geschwindigkeit beim Auftreffen mit berücksichtigt werden, und natürlich auch die Schwerkraft, denn die wirkt immer, und die betrachtete Zeit ist nicht Null. Eine schöne Aufgabe! Viel Spaß beim Rechnen  ------------------
Roland
www.Das-Entwicklungsbuero.de It's not the hammer - it's the way you hit! [Diese Nachricht wurde von Roland Schröder am 20. Okt. 2018 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Friendly
Mitglied
Beiträge: 69
Registriert: 05.06.2017
|
erstellt am: 20. Okt. 2018 19:26 <-- editieren / zitieren --> Unities abgeben:
Hallo zusammen! Vielen lieben Dank nochmal für die Antworten! Es ist wie du sagst Roland. Die Kraft steigt und erreicht ein Maximum. Die Kraft im Maximum habe ich tatsächlich bereits ermittelt. Die Geschwindigkeit nach dem Rückprall ebenfalls! Beides stammt aus Simulationen. Die Kraft wirkt über 3 ms, daraufhin prallt der Balken wieder vom Boden ab und die Kraft ist 0! Er ist komplett in der Luft und dreht sich. Nun möchte ich gerne analytisch berechnen, wie lange es dauert, bis das obere Ende den Boden berührt. Meine Überlegung ist eine Kopplung aus Drehung des Balkens und eben dem Zusammenwirken von der Gravitation und der Rückprallgeschwindigkeit. Deswegen dachte ich mir, ich vereinfache dies etwas. Ich nehme das Kraftmaximum und berechne darüber das eingeprägte Moment. Über das Moment berechne ich in Abhängigkeit der Zeit die Winkeländerung. Und über die Winkeländerung trigonimetrisch den Höhenverlust des oberen Endes in Abhängigkeit der Zeit. Dies setze ich noch mit der guten alten Gleichung: s=1/2*g*t^2+v_rück*t+s0 mit s0= Anfängshöhe in Verbindung. Diese Gleichung kann ich dann mit s=0 nach t auflösen und erhalte dann die Zeit, in der das obere Ende auf den Boden prallt. [Diese Nachricht wurde von Friendly am 20. Okt. 2018 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Roland Schröder
Ehrenmitglied V.I.P. h.c.
Dr.-Ing. Maschinenbau, Entwicklung & Konstruktion von Spezialmaschinen
Beiträge: 13189
Registriert: 02.04.2004 Entwicklung von Spezialmaschinen und Mechatronik
Autodesk Inventor
|
 erstellt am: 20. Okt. 2018 21:27 <-- editieren / zitieren --> Unities abgeben: Nur für Friendly
erstellt am: 20. Okt. 2018 21:27 <-- editieren / zitieren --> Unities abgeben: Nur für Friendly
|
Friendly
Mitglied
Beiträge: 69
Registriert: 05.06.2017
|
erstellt am: 21. Okt. 2018 13:02 <-- editieren / zitieren --> Unities abgeben:
Wird als Bezugspunkt der Schwerpunkt des Körpers gewählt, ist der Drallsatz meines wissens nach einfach: M = dL/dt, mit M dem von außen angreifenden Moment und L dem Drehimpuls. Und M = I * a , mit I dem Trägheitsmoment und a der Winkelbeschleunigung. Hab ich einen Denkfehler? Vermutlich ja, sonst hättest du mir nicht empfohlen den Drallsatz zu verinnerlichen. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Roland Schröder
Ehrenmitglied V.I.P. h.c.
Dr.-Ing. Maschinenbau, Entwicklung & Konstruktion von Spezialmaschinen
Beiträge: 13189
Registriert: 02.04.2004 Entwicklung von Spezialmaschinen und Mechatronik
Autodesk Inventor
|
erstellt am: 21. Okt. 2018 13:24 <-- editieren / zitieren --> Unities abgeben: Nur für Friendly
Ja, so lautete der Drallsatz, aber Du musst ihn auch richtig anwenden. Das Moment bzw. die Kraft greift nur kurze Zeit an und ist in dieser Zeit auch nicht konstant. Es gibt aber auch nur in dieser kurzen Zeit eine (Dreh-)Beschleunigung. Das Intergral über diese Zeit der (Dreh-)Beschleunigung ergibt die dabei erreichte (Dreh-)geschwindigkeit. Diesen Vorgang musst Du in Deinem Rechnungsansatz abbilden. ------------------
Roland
www.Das-Entwicklungsbuero.de It's not the hammer - it's the way you hit! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Friendly
Mitglied
Beiträge: 69
Registriert: 05.06.2017
|
erstellt am: 21. Okt. 2018 16:41 <-- editieren / zitieren --> Unities abgeben:
Ich denke ich habe begriffen, was du meinst! Danke!  Ich denke um dies am elegantesten zu lösen, sollte die Kraft F zunächst als Funktion über die Zeit definiert werden. Dadurch ergibt sich bei der Integration automatisch der Bereich, in der die Winkelbeschleunigung wirkt und daraufhin der Bereich, indem die konstante Winkelgeschwindigkeit wirkt. I*alpha = F(t)*d // alpha = Winkelbeschleunigung Die zweifache Integration liefert: I*gamma = 1/2*F(t)*d*t2+c1*t+c2 // gamma = Drehwinkel, c1=c2=0 Nun nach gamma auflösen und ich erhalte den Drehwinkel in Abhängigkeit der Zeit. Das erste Integral würde zur Drehgeschwindigkeit führen. Da die Kraft irgendwann zu 0 wird, wird sich eine konstante Drehgeschwindigkeit einstellen. Das zweite Integral liefert dann den Drehwinkel. Dadurch wird der Zeitraum, in der die Beschleunigung wirkt und der, bei dem die Beschleunigung 0 ist und nur die konstante Drehgeschwindigkeit wirkt, berücksichtigt. Mein Gedanke der Vereinachung war dadurch begründet, dass die Kraft im Kraft-Zeit-Verlauf nur ein ganz kleiner Peak ist. Was ich natürlich falsch gemacht habe, ist die Tatsache, dass die Kraft irgendwan nicht mehr wirkt. [Diese Nachricht wurde von Friendly am 21. Okt. 2018 editiert.] Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Roland Schröder
Ehrenmitglied V.I.P. h.c.
Dr.-Ing. Maschinenbau, Entwicklung & Konstruktion von Spezialmaschinen
Beiträge: 13189
Registriert: 02.04.2004 Entwicklung von Spezialmaschinen und Mechatronik
Autodesk Inventor
|
erstellt am: 21. Okt. 2018 16:59 <-- editieren / zitieren --> Unities abgeben: Nur für Friendly
Zitat:
Original erstellt von Friendly:
Die zweifache Integration liefert:...
Nein, tut sie nicht, jedenfalls nicht so! F(t) ist in dem entscheidenden Zeitintervall nicht konstant. Du kannst nicht außen lustig über die Zeit integrieren, während drinnen ein Term steht, der sich zeitlich verändert. Ohne korrekte Integralrechnung keine korrekte Dynamik. ------------------
Roland
www.Das-Entwicklungsbuero.de It's not the hammer - it's the way you hit! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Friendly
Mitglied
Beiträge: 69
Registriert: 05.06.2017
|
erstellt am: 21. Okt. 2018 17:22 <-- editieren / zitieren --> Unities abgeben:
Ohja, da habe ich geschlurt beim Aufschreiben! In der Gleichung steht natürlicht nicht F(t) mehr, sondern das zweifache Integral von F(t). Nennen wir es H(T). I*gamma = 1/2*H(t)*d*t^2+c1*t+c2 // gamma = Drehwinkel, c1=c2=0 Sorry, in Gedanken meinte ich das auch so, nur habe ich das falsch wiedergegeben. F(t) ist keine Konstante. Anonsten müsste der Rest korrekt sein meine ich. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Roland Schröder
Ehrenmitglied V.I.P. h.c.
Dr.-Ing. Maschinenbau, Entwicklung & Konstruktion von Spezialmaschinen
Beiträge: 13189
Registriert: 02.04.2004 Entwicklung von Spezialmaschinen und Mechatronik
Autodesk Inventor
|
 erstellt am: 21. Okt. 2018 20:35 <-- editieren / zitieren --> Unities abgeben: Nur für Friendly
erstellt am: 21. Okt. 2018 20:35 <-- editieren / zitieren --> Unities abgeben: Nur für Friendly
|
Friendly
Mitglied
Beiträge: 69
Registriert: 05.06.2017
|
erstellt am: 22. Okt. 2018 12:44 <-- editieren / zitieren --> Unities abgeben:
Ohje da war ich schon wieder schlurig, tut mir sehr Leid! Um das gante zu korrigieren: I*a = Integral(Integral(F(t)*d)) // a=Winkelbeschleunigung Aus dem zweichenfachen Integral erhalten ich die Einheit J*s^2. Sprich kg*m^2. Dies ist ebenfalls die Einheit des Trägheitsmoments. Das dividieren durch das Trägheitsmoment liefert daraufhin: b=Integral(Integral(F(t)*d))/I // b=Winkel bzw. Winkeländerung Der Winkel wird hierbei in Rad ausgegeben. Liebe Grüße,
Friendly Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Friendly
Mitglied
Beiträge: 69
Registriert: 05.06.2017
|
erstellt am: 28. Okt. 2018 14:09 <-- editieren / zitieren --> Unities abgeben:
Weiß eventuell jemand noch einen Rat, wie ich es berechnen kann? Ich gehe davon aus, dass es keine Gravitation und keine Reibung gibt. Nochmal zu zusammenfassen: Ein Balken prallt mit bestimmter Masse und Anfangsgeschwindigkeit schräg auf eine Wand. Daraufhin feder er zurück und dreht sich. Es wirkt eine Kraft auf den Balken, die ihn bremst und rotieren lässt. Der Kraftverlauf gegenüber der Zeit ist bekannt. Die Trägheitsmoment und Dimensionen des Balkens sind bekannt. Um die Änderung des Drehwinkels zu berechnen, rechne ich: I*a = F(t) * d // I=Trägheitsmoment, a = Winkelbeschleunigung, d = Hebel zum Schwerpunkt Da a = d^2 phi / dt^2 // Phi ist der Drehwinkel folgt d^2 phi / dt^2 = F(t) *d / I dies zweil macl integrieren liefert phi phi = Int(Int(F(t)))*d / I Hierbei gehe ich vereinfach davon aus, dass d während der Kraftübertragung konstant bleibt. Liebe Grüße und ein schönes restliches Wochende euch allen! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Roland Schröder
Ehrenmitglied V.I.P. h.c.
Dr.-Ing. Maschinenbau, Entwicklung & Konstruktion von Spezialmaschinen
Beiträge: 13189
Registriert: 02.04.2004 Entwicklung von Spezialmaschinen und Mechatronik
Autodesk Inventor
|
erstellt am: 28. Okt. 2018 16:40 <-- editieren / zitieren --> Unities abgeben: Nur für Friendly
Ohne Reibung gibt es nach dem Stoß nur noch eine konstante Winkelgeschwindigkeit und ohne Schwerkraft auch nur noch eine konstante Schwerpunktgeschwindigkeit. Wenn Du jetzt für den Stoß einen bekannten zeitlichen Verlauf der Kraft (oder auch einen bekannten Impuls F*t) annimmst, kannst Du das alles so berechnen. Die Annahme d=const. für den transienten Stoßzeitraum geht m.M.n auch in Ordnung. Wo ist jetzt noch das Problem? ------------------
Roland
www.Das-Entwicklungsbuero.de It's not the hammer - it's the way you hit! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Friendly
Mitglied
Beiträge: 69
Registriert: 05.06.2017
|
erstellt am: 28. Okt. 2018 19:49 <-- editieren / zitieren --> Unities abgeben:
Vielen Dank für die Antwort! Ich war mir unsicher hinsichtlich des Hebels. Ich hatte überlegt, das womöglich der Balken zunächst bei Kontakt nicht um den Schwerpunkt, sondern den Kraftangriffspunkt rotiert. Beim Freischneiden des Balkens wird aber deutlich, dass er um seinen Schwerpunkt rotieren muss. Wenn die Kraft an der Drehachse wirken würde, dann würde der Balken außerdem nicht rotieren. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
 Foren auf CAD.de (alle Foren)
Foren auf CAD.de (alle Foren)



 |
|